#星计划创作者# #新能源汽车# #比亚迪# $比亚迪(SZ002594)$ @今日话题
作者:11号线人
没有在激光雷达身上“吃过亏”的自动驾驶公司,就如同“没有迷恋过奥特曼”的小朋友,是有巨大的遗憾的!
为什么在激光雷达宣传上的200m测距能力,在视场角边缘为何只有100m?在烈日当头和夕阳西下时,激光雷达点云的噪点水平怎么和化妆和未化妆的姑娘一样,相差这么大?遇到高反射率物体和低反射率物体时,激光雷达怎么和见了仇人一样,剑拔弩张?
激光雷达技术演进的路线尚未明确,新加入的玩家又如雨后春笋,导致市面上基于不同技术路线的激光雷达新产品层出不穷,且都在王婆卖瓜,自卖自夸。自动驾驶公司前期不断在核心算法、场景理解上建立竞争壁垒,忽视了自动驾驶硬件导入前测试验证。结果在实际落地过程中,硬件暴露的各种问题成为影响项目进度的罪魁祸首。
浓妆淡抹与穿金戴银都是表面现象,内心的真善美才应是我们追逐的本质。今天就和大家分享激光雷达“盛世美颜”下掩盖着哪些的“丑陋”(自动驾驶真的很难很难,远非几个公司的几个视频演示就能解决的)。
一、“盛世美颜”掩盖下的“丑陋”
下文列举了部分激光雷达容易发生的一些典型问题,有的是硬件原理问题,有的是软件算法问题。问题之间可能还存在相互掣肘的关系,如何在博弈中设计最优的产品,真正考验着激光雷达厂商的系统能力,也是决定其能否成为“百年老店”的关键。
1、“拖尾”问题
按照测距方式不同,激光雷达主要分为ToF(Timeof Flight,飞行时间)与FMCW(FrequencyModulated Continuous Wave,调频连续波)两类。ToF类型是目前量产的激光雷达的绝大多数选择。
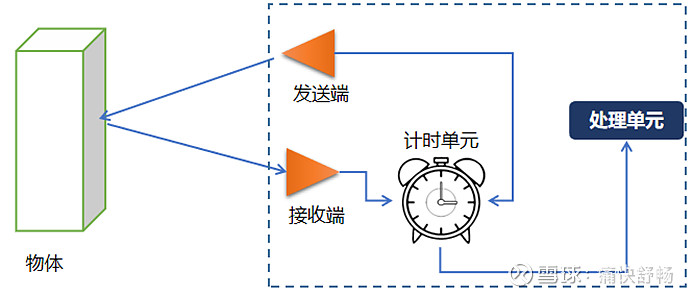
在ToF(Time of Flight,飞行时间)方法中,激光雷达发送端发射一个脉冲,打到物体后返回,接收端接收到回波后计算两者之间接收时间差,并通过乘以光速来实现物体之间距离的测量。
理想情况下,脉冲打到物体表面是一个理想的光斑点,但由于实际的脉冲存在一定的发散角,所以打到物体上会是一个面,且随距离增加,这个面会越大。这样就存在一种可能性,当存在前后两个物体,且激光雷达脉冲打到前面物体的边缘时,就有可能出现部分激光脉冲打到后面物体上,这就是激光雷达的“拖尾”问题。
拖尾问题的直接后果就是激光雷达打出去的一个脉冲返回两个回波,导致激光雷达陷入“迷茫”,无法判断以哪个距离为准。解决“拖尾”问题,如果从源头上杜绝的话,那就是选用能量更聚焦、发散角更小的激光脉冲发射器。如果从算法上优化的话,可以通过判断角度阈值是否在合理范围内,从而实现拖点甄别及删除。
2、盲区“吸点”
激光雷达探测器一般有几到几十纳秒的Dead Time,Dead Time指是接收到一个激光脉冲后到再能接受一个新激光脉冲所需的最短时间。当一束激光脉冲打出去的时候,首先会在激光出射镜头产生一个内反射信号被探测器接收,如果障碍物距离太近,由于激光接收器还处于Dead Time时间,近距离物体的脉冲回波无法被探测到,从而导致近距离物体测距不准。
激光雷达探测近距离物体时出现的测距不准问题被称为“吸点”,这个是困扰整个行业的难题,是需要底层探测器硬件不断进化。测距不准的近距离区域通常会被设定为“盲区”,这个盲区的大小通常在0.1~1m之间。
3、高反“鬼影”
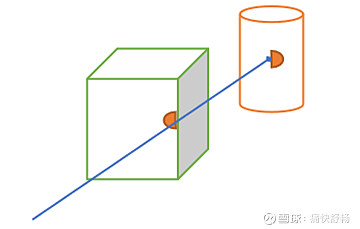
对于高反射率物体,进入到激光雷达视场及测距范围后,输出的点云除了在真实位置有成像以外,还容易在其它位置形成一个形状、大小类似的成像,而这个虚假的成像被称为“鬼影”。不同类型激光雷达产生“鬼影”的行踪各不相同。
“鬼影”的形成是由于激光雷达对高反射率物体反射回来的高强度回波非常敏感,在实际驾驶场景中,常见的高反射率物体包括交通指示牌、锥桶、三角指示牌、汽车牌照,尾灯等。
如下图所示,左侧本来激光无法扫描到,但是由于右侧存在高反指示牌的“鬼影”现象,导致在左侧形成一个形状、大小相似的点云。
4、高反“膨胀”
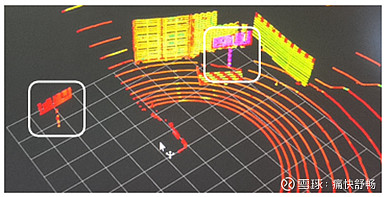
对于高反射率物体,另外一个异常现象就是“膨胀”。“膨胀”是指激光扫描高反射率物体后,输出的点云会向四周扩散,看起来就像“膨胀”了一样,因此称为高反“膨胀”
下图白框框出来的部分本来是一些高反的细杆,但由于“膨胀”问题的存在,活生生变成了一个球。解决高反“鬼影”和高反“膨胀”是一个系统工程,既需要硬件本身具有高反射信号的良好分辨能力,又需要算法配合进行适中的优化。

5、空洞
对于近处低矮障碍物,激光雷达由远及近靠近过程中,出现的点云“时有时无”的丢失现象被称为“空洞”。障碍物原始点云的“时有时无”会让感知软件难以连续跟踪,从而没法准确判断是不是一个固定障碍物,容易导致危险的急刹车或频繁的“减速加速”现象。
6、阳光干扰
当车辆面向太阳方向行驶的时候且激光雷达视窗也朝向阳光方向,如果没有良好设计的处理系统,很容易导致激光雷达点云中出现明显噪点。
7、对射干扰
不同激光雷达之间如果靠得太近,不同雷达发射和接受脉冲容易被混淆,导致点云出现噪点。
二、通过产品验证来实现“去伪存真”
面对众多纸面上参数相似,采购价格接近,对接商务小姐姐颜值相当的激光雷达产品,自动驾驶公司该如何花费适中的人力、物力,用适中的时间找到价值观一致的产品?如何剔除人为主观厌恶,达到去伪存真,检验骡子还是马的目的?可以分为三个阶段来进行产品验证。
第一个阶段为产品验证阶段,主要包括单体性能验证和单体架构级功能验证两个步骤。对于激光雷达来说,单体性能验证内容主要包括(1)激光雷达纸面参数的真实情况;(2)典型物体的识别效果;(3)特殊场景的性能表现;(4)架构级功能的支持情况,其中单体架构级功能验证主要用来验证产品是否满足平台化架构对零件的功能要求,包括时间同步方式及精度、网络管理、电源管理、诊断配置升级等功能。
产品验证阶段的测试方案由产品部门收集来自客户场景、系统架构、算法研发等需求,汇总形成的一份准入测试用例,并由测试部门负责执行,技术Leader牵头进行决议。
第二个阶段为研发验证阶段,主要包括软件系统验证和硬件系统验证两个步骤。研发验证前需要将一套硬件布置在测试车辆上,布置的位置和角度应为理论上的量产布置位置。软件系统验证为各个算法模块进行算法匹配验证、理论布局验证、CPU占用、AI算力消耗及内存读写速度等方面的验证。硬件系统验证主要考察电气连接方案和机械固定方案是否满足整车系统稳定,可靠的要求。
第三阶段为实车验证阶段。验证内容包括新激光雷达的可靠性、耐久性、一致性。测试部门通过对易出问题的使用场景或工况进行汇总,可以刻意让激光雷达工作在这些场景中,以加速可靠性、耐久性、一致性验证。根据现场易出问题的场景、设计有针对性的测试用例,从而决议是否进行大规模批量化导入。
写在最后:
1、激光雷达,远非某些新势力们在营销宣传上表现上的“那么美丽”,无论是自身硬件的问题,还是软件算法的困难,尚未解决很多日常经常遇到的真实场景问题。
2、自动驾驶,真的很难很难,更远非一两家算法公司、新势力在“有限场景”所演示的那样具备大规模商用的基础。
3、对于无论是投资者还是消费而言,还是醒醒吧,不要被想象迷惑了双眼!——距离激光雷达的大规模高效商用和完全意义上的自动驾驶,还需要很长时间的演化与迭代,而这个周期至少5年起步,以10年为周期,如果能够达成初步结果,都是非常巨大的进步了!