| 发布于: | iPhone | 转发:1 | 回复:81 | 喜欢:5 |
马斯克对于自动驾驶一直坚持纯视觉路线,他的观点是:当雷达路线和视觉路线出现分歧时,你相信哪一个?视觉的精确度要高得多,所以与其进行传感器融合,不如加倍使用视觉,传感器是一种比特流,相机的比特流比雷达(或激光雷达)高出几个数量级。
雷达必须显著提高比特流的信噪比,才值得进行复杂的集成。
随着视觉处理技术的进步,雷达将被远远甩在后面就在这几天TikTok团队联合香港大学,浙江大学发表了论文《深度无所不能》证明了马斯克说得没错:视觉就是一切
马斯克对于自动驾驶一直坚持纯视觉路线,他的观点是:当雷达路线和视觉路线出现分歧时,你相信哪一个?视觉的精确度要高得多,所以与其进行传感器融合,不如加倍使用视觉,传感器是一种比特流,相机的比特流比雷达(或激光雷达)高出几个数量级。
雷达必须显著提高比特流的信噪比,才值得进行复杂的集成。
随着视觉处理技术的进步,雷达将被远远甩在后面就在这几天TikTok团队联合香港大学,浙江大学发表了论文《深度无所不能》证明了马斯克说得没错:视觉就是一切
也就你们还信特斯拉的FSD了
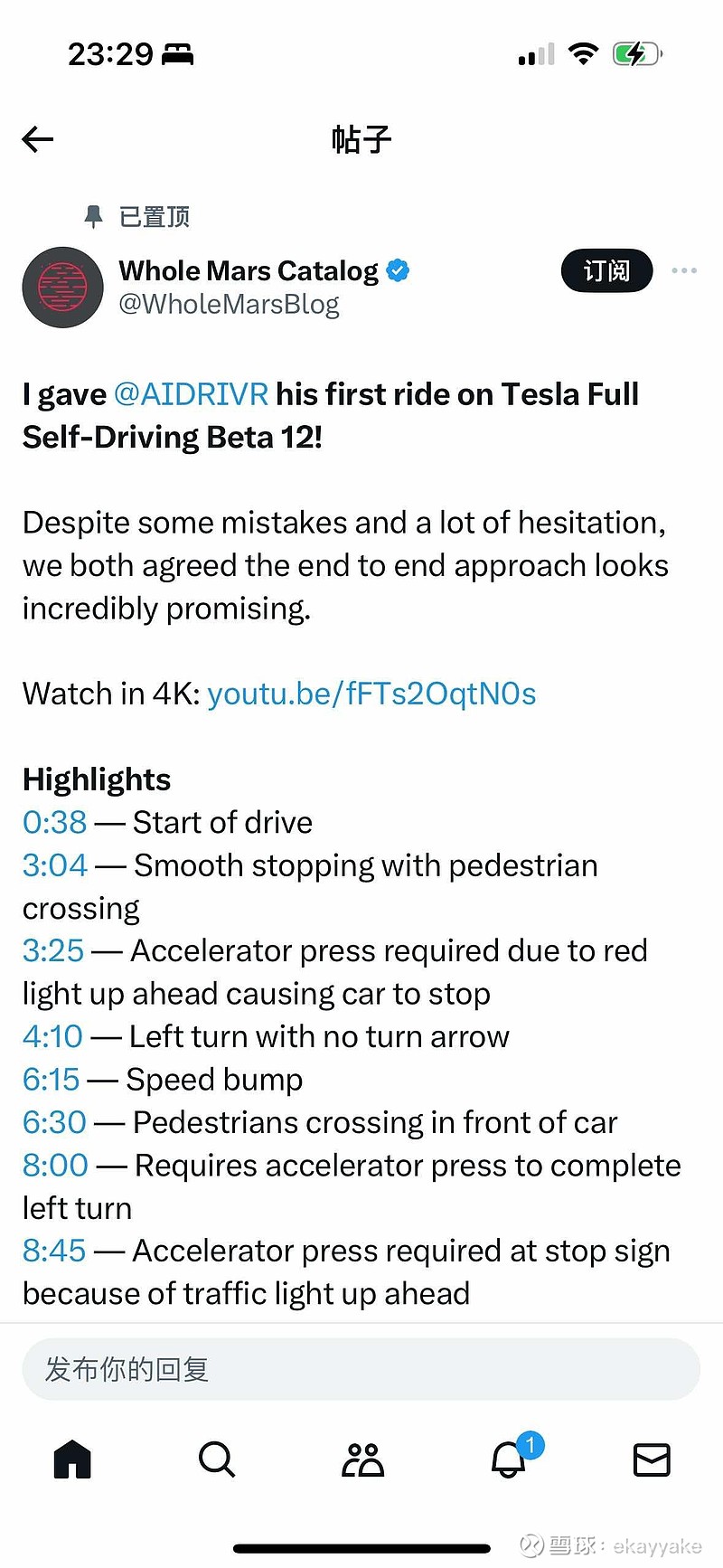
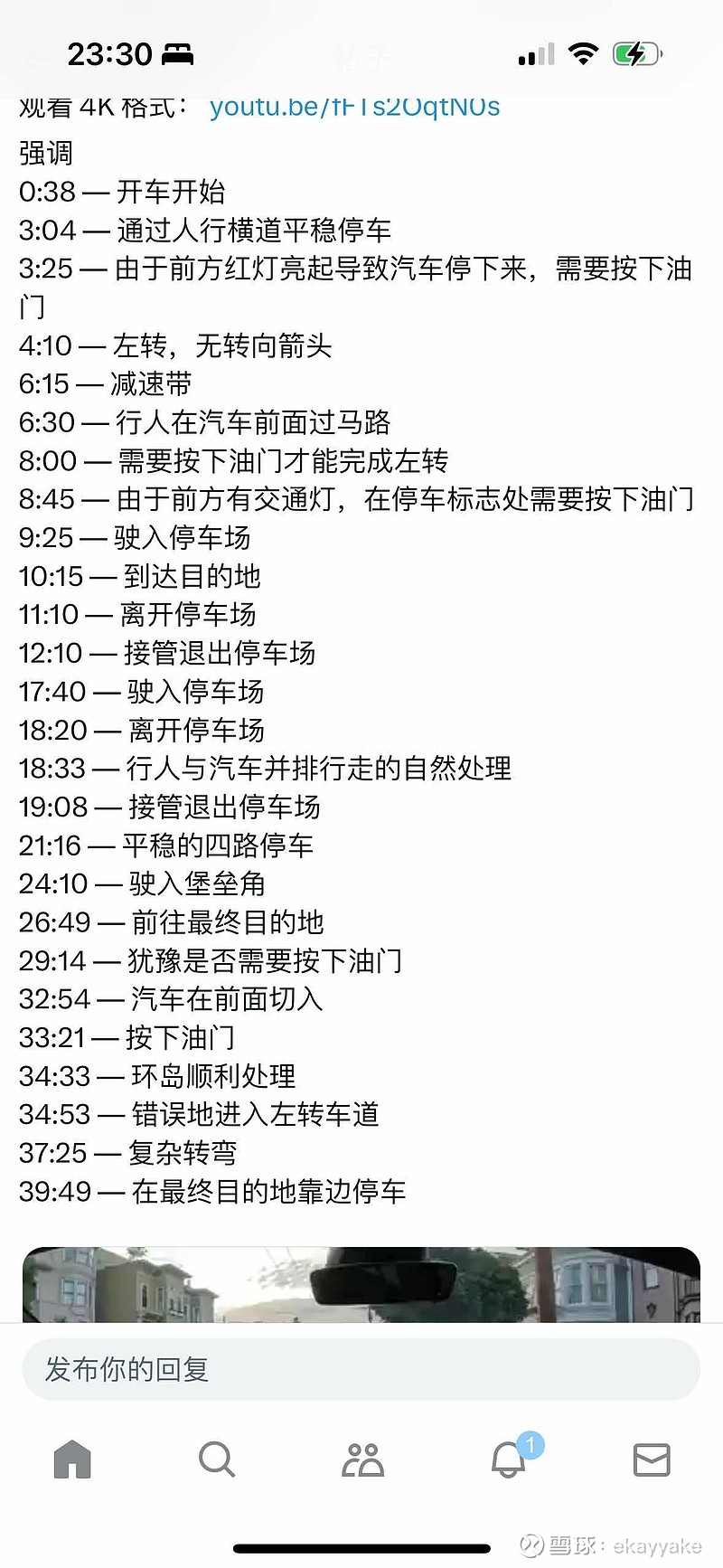
主要的干预是踩下油门。在完全无人驾驶前,也许未来的驾驶模式主要就是踩油门
我还是觉得以视觉为主,雷达为辅的方案比较好,评论区有说两个信号冲突了怎么办,我的想法是摄像头能识别就以摄像头为主,而当摄像头识别不了才采用雷达的数据,因为纯视觉的话,其实余承东也说过,黑色的地方怎么办,比如山洞,所以特斯拉现在纯视觉的自动驾驶,大灯已经不能人为控制了但让我最担忧的其实还是摄像头识别这个距离怎么把握
在公共道路上的自动驾驶是天方夜谭,不管出事故的概率再低,只要不是零,都没人会用。在封闭环境的自动驾驶是可行的。
我真的不知道如何处理县城菜市场那种情况,那种复杂程度超越了算法的能力
乐观的同学要回忆一下,elon想要的是8个9的事故率,就是一亿英里出一次事故,预计一下差距
全新ai架构下的系统 与其讨论当前版本的测试效果 更想看它是否真的可以通过看视频就可以快速自我迭代 所以楼主说的也对 看它收敛的速度吧 如果每周能出一个新版 而且在近期敢推送给大批量的用户体验 那就是真的突破了