中国工程院院士邬贺铨,正在就“车路城协同发展实践探索及路径展望”展开讨论:
他介绍,去年年底,中国5G基站已经有300多万台了,占移动通信基站大概是1/3,占全球5G的60%。“现在从5G要到5.5G,今年是5.5G的商用年,5.5G是在原有的大连接、高可靠、低时延、增强移动宽带的基础上会增加很多新的能力,比如连接密度、定位精度、比特能效都有提升。现在通过5G提供沉浸式交互实景导航和车载娱乐体验,把时延大大控制下来,有利于智能驾驶的应用。”
邬贺铨认为,另外一个值得注意的技术趋势是人工智能。大模型本身,现在发布的ChatGPT也好、SORA也好都是基础大模型,即语言视频大模型,落到应用还有行业大模型,比如智能交通还需要有智能交通大模型,而且会影响到周边的载体、环境。
他还指出,利用人工智能可以解决道路数据采集的难题。“有人说自动驾驶的商业化落地要有百亿公里的路测数据,就是相当于100辆汽车每天不停地跑要测试100年,这根本是做不到的。现在怎么办?利用人工智能,我们在已有的测试,白天测试的场景可以通过迁移学习变成晚上的场景,甚至可以仿真日常司机的不规范行为,包括一些危险的场景,通过这样可以获得解决真正的路测不可能覆盖长尾场景问题。”
他举例称,特斯拉也只做了20亿公里,离100亿公里的测试只有1/5,现在特斯拉认为不再做真实路段的测试了,通过人工智能的办法来完善路测的数据,基于这种大模型的路侧每天就可以搞上百万公里。
此外,可以通过SORA让汽车找出各种各样的场景。邬贺铨说,比如旧轿车、造出一个水下开车的场景、改变了路边的状况,在SORA的基础上通过进一步的迁移学习就可以派生出更多的视频,可以丰富对自动驾驶汽车的训练。
邬贺铨表示,芯片也需要增强。他介绍,当然今年市场上已经有130亿参数的手机出售了,单独手机不需要联网就有智能涌现能力,有些公司已经宣称,今年年底以前要推出千亿参数推理能力的手机,迁移参数手机相当于GPT—3的能力了。“如果放在汽车上,将来单车智能可以进一步提升,可以把汽车变成AI Agent,通过这样实现汽车的车路城网协同,不需要连到网上,这样有什么好处呢?直接在汽车上智能化处理成本低、时延低,可以让用户的隐私数据不必上到云上,有高度隐私和个性化的支撑。”
邬贺铨还指出,通过人工智能以及5G等能力,可以进一步丰富智能座舱,实现人车交互的智能化,提升驾驶的安全性、舒适性、便捷性,比如中控屏、车内的娱乐系统,车里是有很大噪声的,现在可以显著降噪,当然也可以通过语音识别释放功能,解放双手、双眼,用手势实现控制自动驾驶等。
邬贺铨总结称,当前生成式的语言大模型和视频大模型技术突破为人工智能成为物理世界的引擎拉开了序幕,将进一步增强单车智能和云路智能。他强调,车联网将成为承载新质生产力的新兴产业,当前需要建立全国统一的车联网投资与运营主体,探讨商业模式,促进法规建设,凝聚产业链相关方力量,完善车联网发展生态。
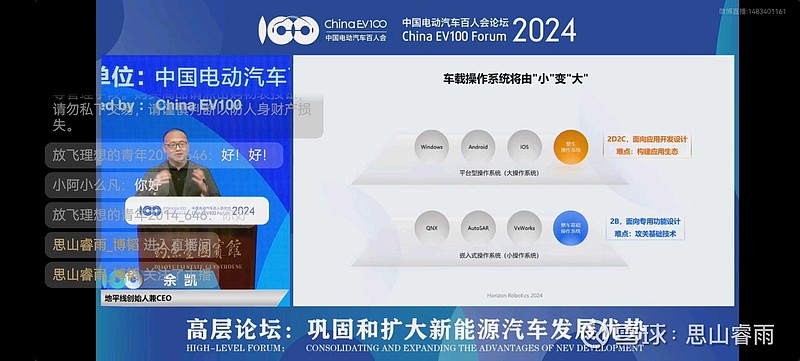
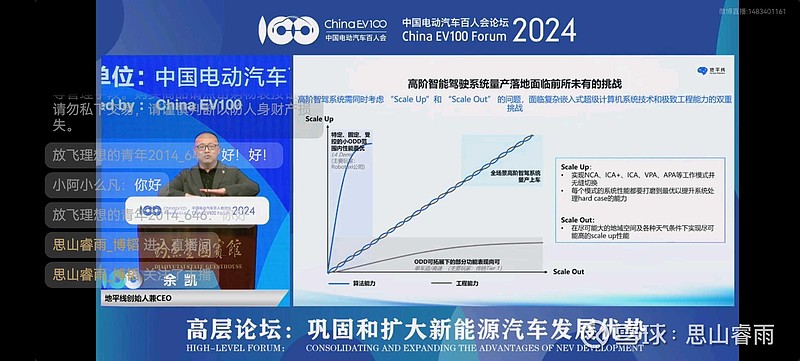
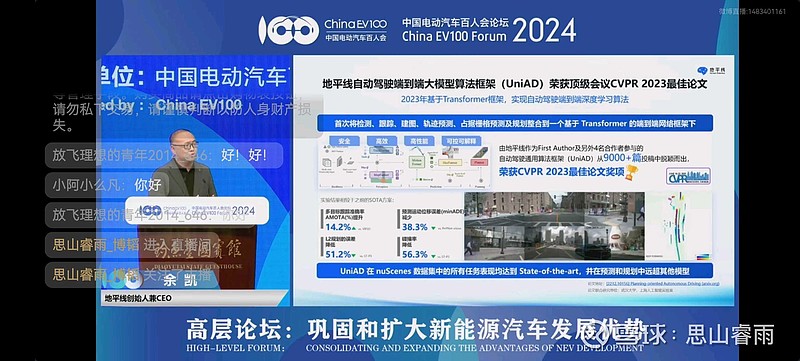
$小鹏汽车(XPEV)$ 何小鹏和$赛力斯(SH601127)$ 问界余大嘴把智驾吹上天,而且华为自吹已经超越小鹏,可是最实事求是地说出ADAS现状的是地平线的余凯,从“可用、好用、爱用”的角度对高快NOA和城市NOA进行了描述,附上一张关键的slides。$比亚迪(SZ002594)$
有条有理的说明比“遥遥领先”令人信服。大嘴应该注意了!
新技术的发展,往往不像人在市场高潮期时的乐观和光芒万丈,而一马平川;但也不会像人在低谷期时的一片悲观和暗无天日,而前路迷茫。总归有人在行业遍体鳞伤时,依然会默默前行。在#新能源汽车# #智能驾驶# 同样如此,王传福、Elon、小鹏、华为余大,还有名气稍小的大疆、地平线、元戎启行,魔门塔等,真是你方唱罢,我登场,热辣滚烫
$比亚迪(SZ002594)$ $特斯拉(TSLA)$ $小鹏汽车-W(09868)$
#新能源汽车# #智能驾驶# $比亚迪(SZ002594)$ $特斯拉(TSLA)$ $小鹏汽车-W(09868)$
“让AI像人类司机一样开车,今年就能做到。”——这是参加3月17日召开的中国电动汽车百人会汽车新质生产力论坛的深圳元戎启行科技有限公司CEO周光向外界传达出的强烈信号。
在这场行业论坛上,周光表示,智能驾驶端到端模型将会成就一位“超级AI司机”,开启物理世界通用人工智能技术的新纪元。他透露,目前,元戎启行公司已经成功将端到端模型适配到量产车上,该批量产车将于今年投入消费者市场。
据了解,在当前的国内消费市场,智能驾驶系统仍然采用模块化模型,将感知、预测、规划分为三个独立的模型。每个模型的技术栈差异较大,处于下游的规划模型需要依赖工程师编写大量代码去制定行驶规则。在模块化的技术架构下,信息的传递会出现减损,系统的维护难度大,无法从容应对复杂路况。
Δ 图为元戎启行CEO周光。
而端到端模型则截然不同,该模型将感知、预测、规划三个模型融为一体,无需程序员编写冗长的代码去制定规则,而是用海量数据去训练系统,赋予机器自主学习、思考和分析的能力。端到端模型不会出现信息传递减损,能够更好地处理复杂的驾驶任务,解决了模块化模型存在的所有“痛点”。
“智能驾驶信息的传递不应该是你画我猜,而是像人类一样对所见到的信息作出最直接的反应。模块化模型是将一个复杂任务分解成多个子任务,逐个解决,这样的解决问题方式既曲折又容易出错。而端到端模型则是基于问题的根本,直接寻求最优的解决方案。”周光说。
Δ 元戎启行端到端模型技术变迁。
早在2023年8月,元戎启行就运用端到端模型完成了道路测试。测试过程中,端到端模型能够赋予智能驾驶汽车“人类智慧”:测试车辆会顾虑后车需求,在停车的状态下,“看到”后车打转向灯,主动礼让后车右转;在路况复杂的城中村狭窄路段,搭载端到端模型的车辆行驶流畅,无顿挫感;遇到前方有多辆车违停时,该车不会呆板地停在前车后方,而是能够判断前车的行驶意图,绕开前车行驶;此外,在视线受阻的路况下,搭载端到端模型的车辆也能根据以往的训练经验,快速“脑补”完整的行车场景,做到“脑”中有路,“心”中有数。
Δ 元戎启行搭载端到端模型的车辆进行路测的场景。
行业数据显示,2024年1月新能源乘用车城市NOA(领航辅助驾驶)功能的搭载率为10.69%。周光认为,现阶段智能驾驶技术尚未跨越早期市场与成熟市场的鸿沟,多数消费者与机器共驾的默契还有待提升。等端到端模型上车后,智能驾驶系统会变得更拟人化,更便于消费者操作。他相信,端到端模型能快速推动智能驾驶行业迈向成熟市场,是打造汽车行业新质生产力的重要引擎。
周光表示,端到端模型的应用将会颠覆汽车的工具属性,让汽车变成一个善于思考、推理的出行机器人。对汽车产业链而言,端到端模型将会改变汽车的盈利模式,提高消费者为智驾系统付费的意愿。
“未来,元戎启行将全力推动端到端模型的迭代,加强与主机厂的合作,共同打造更懂消费者的超级AI司机。”周光说。
转:特斯拉纯视觉FSD全量推送,顺风车乘客完全感觉不到AI在开,根据现在车主发布的视频和实测结果,对新系统的看法比较一致,虽然有一些小问题,但瑕不掩瑜,整体还是令人印象深刻:$特斯拉(TSLA)$ $比亚迪(SZ002594)$
有车主说,自己今天用V12.3进行了6次拼车,没有一个乘客意识到车辆在“自己开自己”,并且零接管、零脱离。
还有车主表示,原来自己在所在的社区从不用FSD Beta V11,因为经常出错,但是FSD Beta V12.3让他体验到了有史以来第一次“零接管”,而且系统在很多情况下都像人类,比如等待单车道上左转的车辆,或者马路中停下的送货车。
有车主在旧金山开了6次,每次约8-15分钟的路程来测试新系统,其中只接管了3-4次,系统加速减速非常流畅,比之前任何版本都接近人类驾驶方式,在高速公路上变道和汇入车流时比他自己还要开得好。
从车主po出的视频来看,新系统处理变道、掉头已经非常丝滑:
△来源X用户Jeremy Judkins
并且在面对一些极端场景时,系统也知道如何处理。
比如一位车主在街上使用新系统时,恰好碰到当地正在举办圣帕特里克节庆祝活动,街上车和人都川流不息,系统可以稳稳地根据导航行驶,并且前30分钟路程实现0干预。
△来源X用户Rob Maurer
特别是在车的一侧有骑自行车的人,还有行人站到了马路上时,系统选择减速通过:
△来源X用户Rob Maurer
并且在前方车道突然出现停止车辆,系统也能根据左侧车道情况,及时选择变道:
△来源X用户Rob Maurer
这个车主还表示,整段路程最完美的处理是系统顺利通过拥有6个车道和50多个行人的路口,完全没让接管。
还有在行人乱穿马路时,虽然是绿灯但系统没有急于通过路口,反而选择先礼让行人,同时车辆也能通过绿灯:
△来源X用户Allen Iron
另一位车主发布的视频显示,在右转车道两侧都停了车,视野受限的情况下,系统能做到避让车辆:
△来源X用户Edge Case
同时顺利转弯:
△来源X用户Edge Case
不过车主们也都反馈了一些小问题。
比如在高速上系统没有选择正确的车道,导致错过出口,“至少没有做什么危险的事情”:
而且不止一位车主反馈新系统有时候会选错车道,导致绕远路或者后续需要接管。
在视野遭到遮挡的情况下,系统没能识别路口正有消防车驶来,因此车主接管、踩了刹车:
△来源X用户Rob Maurer
还没能分清红灯笼和交通灯红灯的区别,系统虽然最后识别出来但已经离交通栅栏太近,所以车主及时接管:
△来源X用户The Kilowatts
有车主表示,虽然新系统还是不能处理所有情况,但是已经让他感觉到在不久的将来,完全自动驾驶是有可能实现的。
总结一下就是,虽然FSD Beta V12.3并不完美,需要继续训练迭代,但车主们还是比较满意的。