
01、C-V2X 能解决什么问题
在全球新一轮科技变革中,我们常常提到汽车产业的「新四化」,其中最有聚焦光环的就是智能化和网联化。
自动驾驶就是智能化的方向,那么网联化在汽车身上是如何体现的呢?
经过一个多世纪的发展,现在的汽车已经越来越像一台移动的计算机,每一辆行驶在道路上的汽车都被覆盖在一张无形的通信网络里,车与车之间可以以最快的方式互相通信并且处理数据,每辆车都能实时感知其他车辆的行驶状态和驾驶意图,甚至可以「遥望」在一公里以外的潜在安全威胁,这就使得驾驶员有非常充足的反应时间去规划自己的下一步操作。
这样的技术,就是我们所说的车联网通信技术,它是未来智能交通的一项核心手段。
追溯到本世纪初,最早的车联网功能包括车载导航、远程诊断和车载紧急呼叫(eCall)。而我们现在所谈到的车联网,通常指的是 V2X 通信技术(C-V2X),就是俗称的「车联万物」。
现在汽车圈普遍认可的思路是,车联网是实现自动驾驶的更优选择。单车智能发展到如今,有许多技术瓶颈和无尽的 corner case 需要解决,于是大家不得不换一种思路,考虑如何突破成本和安全的双重局限,打破这个困局。
那么,C-V2X 技术究竟可以突破智能驾驶哪些难题?
1)单车智能需要集成各类传感器来不断完善车辆的感知能力,不过,如果单纯依靠大量堆积各种高端感知设备来实现「无死角感知」,整车成本将会非常惊人,这样的配置将无法下探到中低端车型,无人驾驶车辆会脱离它本身的商品属性。V2X 技术路线将昂贵的感知设备移到路侧,设备需求量远低于安装在车上,通过车路通信传递交通信息,大幅度降低了车载感知设备的投入。
2)V2X 以无线通信技术,通过车车、车路、车云、以及车人等交互关系,实现车辆和道路状态传递(包括车辆的行驶状态和意图、路侧的红绿灯相位信息等),并进行感知信息共享(Collective Perception),以更简洁的车辆感知配置,避免由于盲区问题造成的违章和事故,以相对较低的成本解决了很多自动驾驶长尾问题。
3)单车智能将所有的复杂计算任务都集中在车载计算平台上执行,对算力的要求非常高,当然成本也会随之飙升,也是一项阻碍批量部署的原因。而基于 V2X 的车路协同技术,可以将繁重的计算任务移向路侧单元 MEC,能够大大减轻整车的算力负担。
4)在恶劣天气下,如暴风雪天气,许多感知设备的能力大打折扣甚至失效,而 V2X 直连通信覆盖率可达 1 公里以上,通讯时延小于 20ms,消息发送成功率超过 98%。
5)交通是一个系统性工程,V2X 可以从交通全局的角度为道路使用者分配路权,赋予了交通参与者「协作能力」,从整体交通角度来看,更加高效、节能、环保。根据美国交通部提供的数据,V2X 技术可帮助避免 80% 各类交通事故的发生。
为了更清晰的了解车联网应用,我们将系统划分为三大组成部分:车端、路侧和云服务平台。他们彼此之间可以进行基于 4G/5G 蜂窝网络和 PC5 直连通信的实时信息交互,实现各类车联网场景应用。
本文将着重介绍 C-V2X 技术当前针对车端的各类应用,以及伴随车辆智能升级的新发展趋势。

C-V2X 蜂窝车联网架构示意图
02、标准应用
中国汽车工程学会依托中国智能网联汽车产业创新联盟和中国智能交通产业联盟,与 C-ITS 联盟、IMT-2020(5G)推进组 C-V2X 工作组等合作,制定了适应中国国情的车联网应用层标准 China SAE T/China SAE 53-2017,并于 2017 年 9 月正式发布。
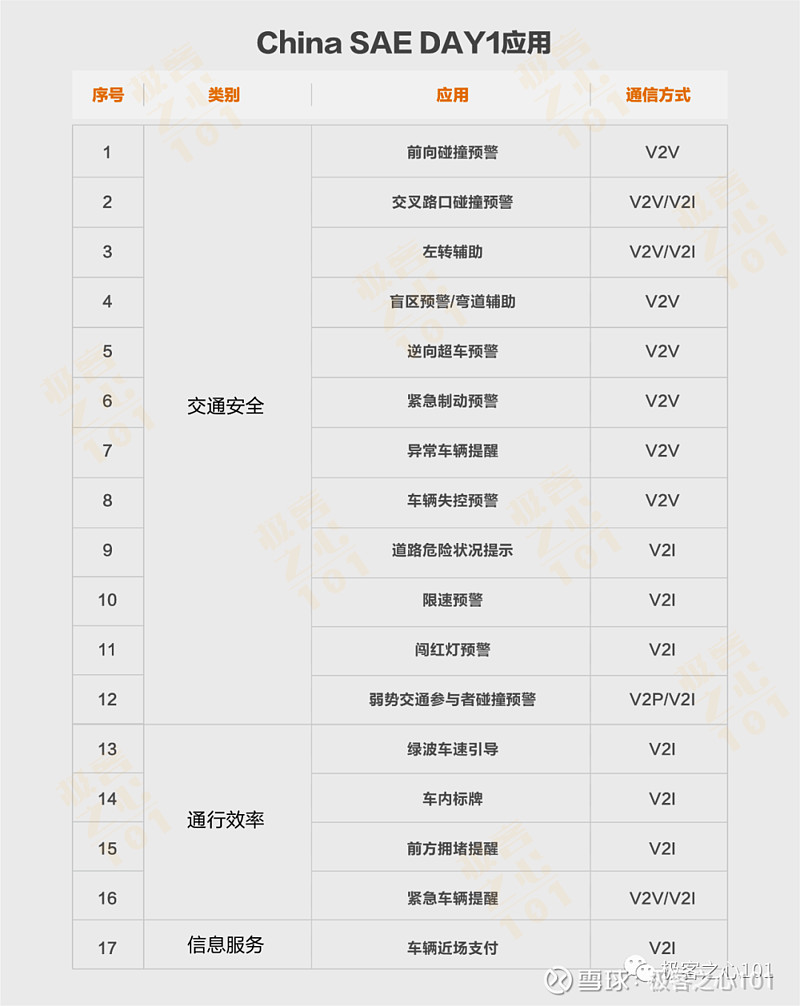
该标准包含一期共 17 个典型应用场景,有相对高的代表性和应用价值,并具有近期可实现性,简称 DAY1 场景,其中包括 12 种安全类业务、4 种效率类业务、1 种信息服务类业务。
通过三年的探索,国内主流 V2X 企业均已完成针对 DAY1 场景的开发和测试,并已在 2018 年至 2021 年的几场「X 跨」行业活动中逐步完成了互联互通测试,配备来自不同厂家的 C-V2X 终端均可互通触发场景。
在 2020 年 11 月,China SAE 发布了《合作式智能运输系统车用通信系统应用层及应用数据交互标准第二阶段》,选取了 12 个典型应用场景作为 DAY2 应用。

截至当期,各家企业对 DAY2 场景的开发仍在进行中,仅有几家头部企业对外宣称已全部实现。
综合来看 DAY1 和 DAY2 场景,我们针对车联网应用中 V2V、V2I 以及 V2P 三种通信模式,分别选取一到两个最具典型性的应用进行详细介绍。
(1)V2V:协作式车辆编队管理
车辆编队是典型的面向自动驾驶的高级应用,由多个具有相同行车路线的车辆构成一个车辆编队,由领航车进行统一的驾驶策略制定和行车管理。
为了保证在很小的车头时距内的安全行车,车辆编队行驶对车辆的自动化等级、通信延时以及车辆定位精度等都有较高的要求。
在城市交通环境下,编队更多的是在行驶过程中动态形成的,即有领航车的确立,车队成员的汇入和脱离,整个编队过程是动态的。编队的同时出发同时到达更符合高速公路场景下大货车的编队需求。
根据目前国内标准对货车编队场景的定义,典型的货车编队中车辆数目不超过 5 辆(包括领航车在内),正常状态下,车队中的所有车辆行驶在同一个车道内。

网络图片
一般来说,涉及车辆编队的场景可分为两大类,车队行为类场景和行驶类场景。车队行为类场景包括车队创建、车辆加入、车辆离开、车队解散等。
车队行驶类的典型场景包括匀速行驶、加/减速行驶、紧急制动、弯道行驶、车队变道等。
例如在车队行为类场景中,如有车辆需要加入行驶队列,可向领航车申请加入车队,收到领航车的同意加入反馈后,自由车可调整自车速度以及与前车车距,从车队队尾加入。
典型的的 V2X 消息收发流程为:

此外,针对车队行驶类场景,为了保持了与前车更小的车头时距(<0.3s)以达到高安全保障并为交通减负的目的,编队中成员之间需要非常频繁地进行车辆动态信息的交互。
主要以交互常规的动态信息(位置、速度、加速度、朝向等)和车队控制驾驶策略信息(加速、减速、停车、变道等)为主。此类信息均需满足高可靠(99.9%)、低时延的要求(<20ms)。
(2)V2V:车辆失控预警
车辆失控预警是指,当远车出现制动防抱死系统(ABS)、车身稳定性系统(ESP)、牵引力控制系统(TCS)、车道偏移预警系统(LDW)功能触发时,该车将对外广播此类状态信息,当具备 V2X 通信能力的周边车辆根据收到的消息识别出该车属于车辆失控状态,且可能影响自身行驶路线时,本应用将对受影响的车辆驾驶员进行提醒,便于周边车辆迅速采取避让等处置措施,避免由于某一车辆失控导致与周边车辆碰撞事故发生。
当然,该应用可触发的前提是失控车与被影响车均具有 V2X 通信能力。
例如,当远车(失控车)与装有 V2X 模块的车辆处于同一行驶方向时,典型的信息交互流程如下:

(3)V2I:绿波车速引导
绿波车速引导(GLOSA: Green Light Optimal Speed Advisory)是指,当车辆驶向有信号灯的路口时,会收到由 C-V2X 路侧单元发送的道路状态数据及信号灯相位信息,在经过计算后,除了在车内显示红绿灯读秒状态,车载单元 OBU 还将给予驾驶员一个建议车速区间,以使车辆能够经济地、舒适地通过信号路口,尽可能的减少由于信号灯造成的停车等待,同时最大限度提高交叉路口通行效率。典型的信息交互流程如下:
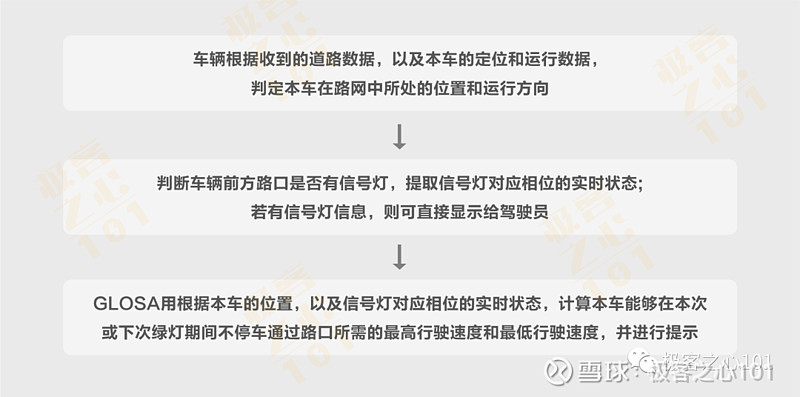
GLOSA 为效率类 V2X 应用,适用于市区或郊区有信号控制路口的路网,该应用对定位精度(<1.5m)和数据的实时性(<200ms)要求相较安全类应用更低。
目前,这项应用作为 V2X 的一项「杀手锏」应用,已经被广泛的实践开来。许多厂家以此为主打功能,推出了面向车的前后装的车端产品。

网络图片——具有 GLOSA 功能的车机

网络图片——中国移动概念机
(4)V2I/V2V:感知数据共享
车辆或 RSU 通过雷达、摄像头等感知设备感知交通环境(如道路交通事故事件、车辆异常行为、落石或遗撒等道路障碍物,及积水或结冰路面状况),并通过 V2V/V2I 将其感知结果共享给其他车辆。
通过感知信息的实时交互,扩展车辆感知范围,丰富车辆感知信息细节,可避免因车辆感知信息不足或感知盲区产生的交通危险。
也就是说,车辆可以共享彼此的 LEM(本地环境模型),融合后成为一个更加丰富更加准确更加可靠的 GEM(全局环境模型)。
使得车辆可以获取自身感知范围外的交通参与者的信息,辅助自身做出正确的驾驶决策,减少交通事故和二次伤害,提高行车安全或通行效率。

网络图片——感知数据共享
感知数据共享的实现过程可以通过两种途径来实现:
通过直连方式通信,车车间交通参与者感知数据共享;
通过直连方式通信,车路间交通参与者感知数据共享。
通信方式可为广播、单播或组播。在有感知数据共享需求的一段连续时间内,触发周期性发送。
可以设想的常见场景是当车辆被高大建筑物、前方大车、侧方车遮挡造成盲区时,或者在弯道/坡道等地形环境下,以及由于强恶劣天气导致视野受限时,都可以通过感知数据共享获得超视距道路信息,从「上帝视角」保障车辆行驶安全。
(5)V2P:弱势交通参与者碰撞预警
弱势交通参与者碰撞预警,是指在行人或自行车出现在车辆盲区时,通过判断是否存在碰撞风险,向驾驶员进行提示的应用。
这项应用在中国的道路交通环境下尤为适用,可以避免大量常见的行人、外卖快递骑手的剐蹭事件。
当然,这项应用能付诸实践的前提是路侧、车端以及行人本身都装有 V2X 通信模块。
目前,DAY1 针对这个应用列举了两个典型场景:
1)车辆行驶时,行人从侧前方出现,且行人被旁车遮挡,处于感知盲区内;
2)车辆准备倒车出库时,行人从侧后方出现,且行人被旁车遮挡,处于感知盲区内。这都就是我们常见的「鬼探头」情况。
典型的 V2X 信息处理过程如下:

车辆和行人均需具备短程无线通信能力,车辆信息通过短程无线通信在 Vehicle 和 Pedestrian 之间传递(V2P),也可以利用路侧感知系统对行人信息进行感知,通过路侧设备发给车辆(V2I),对定位精度(<1.5m)和时延(<100ms)要求不高。
在 DAY2 里,标准对这个应用进行了更加详细的要求。
尽管车联网的基本应用已经可以支持道路安全、交通效率和信息服务类应用,但随着汽车技术和通信技术的持续演进,V2X 基本应用感知周围环境、分享状态信息已经不能满足以自动驾驶为目标的应用需求,我们需要补充更加更精准的车辆状态和车辆驾驶意图等信息。
同时,未来的车联网应用将会被提出更加严苛的通信性能指标,如极低的通信时延(<3ms)、极高的可靠性(99.999%)、更快的传输速率(1Gbit/s)、更远的通信范围(1km),以及支持更高的车辆相对移动速度等。
03、助力车辆智能化升级,面向自动驾驶的 C-V2X 应用
到今天为止,全世界对自动驾驶技术的探索已经走过了三分之一个世纪。
自动驾驶技术发展到今天,基本解决了感知、决策、执行等核心技术问题,却迟迟不能迎来规模商用落地,究其原因,除了严谨算法的庞大时间工程之外,真实应用场景的长尾挑战是自动驾驶技术不可忽视的瓶颈。
因此,不妨改变思路,让车联网技术与单车智能形成互补关系,实现从「单车智能」到「网联智能」的演进,做到全天候、全路况的准确感知,支持高级别自动驾驶的实现。
当前阶段,市场上量产车型以辅助驾驶系统(ADAS)为主,在 2025 年后预计可见更加广泛的 L3+级别自动驾驶商用普及。
使用 ADAS 系统,驾驶主体仍然是人类驾驶员,我们所熟知的辅助驾驶功能以丰富的人机交互形式与驾驶员进行互动,辅助提示相关驾驶信息,如 HUD(抬头显示)、AVM(全息影像检测)、TSR(交通标志识别)、FCW(前向碰撞预警)等,也可以在限定环境下直接由系统对车辆进行控制,如 ACC(自适应巡航)、AEB(自动紧急制动)等。
随着整车智能化升级,由辅助驾驶逐步向高级别自动驾驶演进,V2X 功能与单车智能系统的技术融合路线也在同步探索中。
1)短期来看,V2X 可作为智能座舱系统的一项升级功能,通过各种人机交互界面(车机、HUD 等),丰富驾驶员的感知信息源,以可引起注意但不过度分散注意的方式提供各类安全、效率及信息服务的提示预警信息。
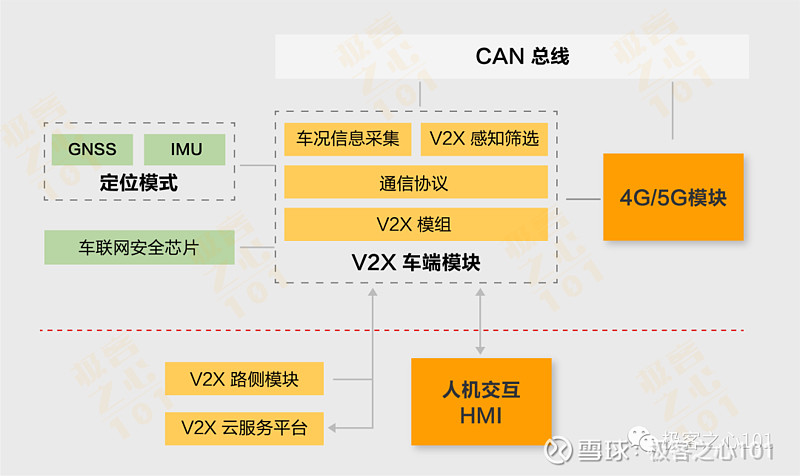
面向提醒的 V2X 车载方案
从实际硬件部署方式考虑,为了满足智能汽车由分布走向集中的电子电器架构,做轻硬件架构设计,车端 V2X 模块可与 T-BOX 集成,使传统的 T-BOX 同时具有车载网关与 V2X 通信双重功能。
同时,借助 T-BOX 中的蜂窝模块,C-V2X 也可实现车联网 CA 安全证书的申请及下载。此外,也可以考虑与车载前装 ETC 集成,实现不停车收费。
这两种硬件部署方案的成熟产品均已在 2021 年 C-V2X 行业活动上亮相。

星云互联 TBOX+V2X 半前装解决方案
1)长期来看,面向高级别自动驾驶车辆,满足人机共驾,甚至全无人驾驶,V2X 将不能只用于提醒,而是会作为整个自动驾驶系统的一项感知源,与雷达、摄像头等感知设备数据融合,被集成在自动驾驶域控制器中,解决自动驾驶系统感知瓶颈问题,同时引入更多的协作式决策应用。
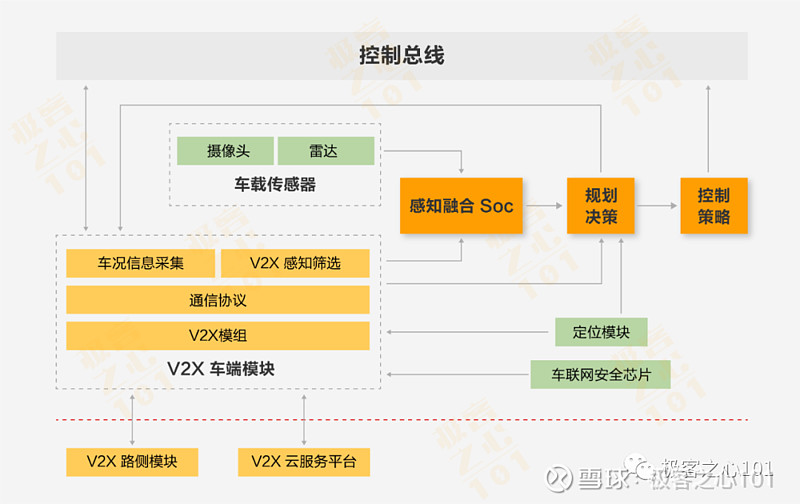
参与控车的 V2X 车载方案
百度 Apollo 结合已落地项目开展了大量 V2X 车路协同应用测试验证和先导示范,实现了共三大类 7 个典型协同感知应用场景,如动静态盲区/遮挡协同感知以及路边低速车辆感知,达到了 L4 级自动驾驶能力。我们从以下几个实例中一起看一下 V2X 到底是如何工作的。
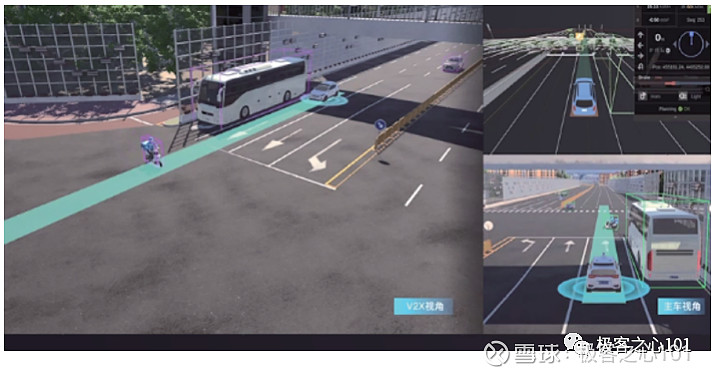
(1)动静态盲区/遮挡协同感知——大车遮挡协同感知
在主车直行时,右侧大车遮挡住了横穿的电动车,通过动静态盲区协同感知,车辆可以提前获取盲区车辆、非机动车或行人的运动情况,作为 AEB 功能的一项感知源,实现自动紧急刹车,避免事故的发生。
(2)动静态盲区/遮挡协同感知——左转/掉头盲区或遮挡协同感知
主车(蓝白色)在路口左转或掉头时,有大卡车或公交车(粉色长多边形)产生了动态盲区遮挡住了后面的车辆,通过 V2X 与雷达和摄像头的全量协同感知,主车车辆可以获取盲区车辆的运动情况,提前进行行驶控制策略调整,避免了车辆急刹或事故的风险。

(3)动静态盲区/遮挡协同感知——左转/掉头盲区或遮挡协同感知
受车端传感器视角和感知策略的影响,自动驾驶车辆很难识别路边低速行进的车辆,如道路养护车辆、缓慢倒车等情况。
通过融合 V2X 的协同感知,可以对处在视野范围内外的路边的缓行车辆进行稳定检测,获取准确的车辆速度、位置等信息,发送到主车进行融合感知,进而避免了主车急刹或者事故的发生。

04、后话
从应用上来说,V2X 确实可以解决很多智能驾驶的难题,这业内都知道,可为什么我们迟迟见不到商用落地呢?究其原因,是大家都在「等」。
自动驾驶企业在等车企的态度,车企在等路侧的动作,而路侧设施在等各地方的基建政策。
只有路侧先行,这条产业链才能活动起来。
由于目前 V2X 路侧设备(RSU)只在一些示范区先导区实现了全覆盖,这就导致一些新上市的车型虽然已经宣称带有 V2X 功能,但几乎都是摆设,车主在平时的驾驶过程中是体验不到任何相关服务的。
其实,车联网技术早已开始在公交、矿山、机场等场景相对简单的细分领域进行商用试水。
并且根据《C-V2X 产业化路径及时间表》的规划,预计到 2025 年,C-V2X 车载前装渗透率将达到 50% 以上,路侧设备也将在主要城市、主要区域、主要公路实现全面覆盖。
我们不妨大胆预想,2025 年之后的智能交通会是怎样一番光景。我们不必在无穷无尽的堵车中浪费生命,更不必担心和各种突如其来的「道路闯入者」发生事故,我们甚至可以拥有自己的专属「绿灯」。
真到了这一天,马路上一定是静悄悄的,没有喇叭声的催促,也没有急刹车的惊魂,只有川流不息,畅通无阻的一条条汽车流线。