Twists
Chapter 3.3.2 part 1
1、定义:任何刚体的速度,无论是由线性运动(平动)组成的部分还是由角速度(旋转)组成的部分,都可以等效地表示为围绕某个螺旋轴的瞬时速度。
2、表示:
1)轴上的一点q、指向轴方向的单位向量s以及螺距h。螺距是沿轴线的线性速度与绕轴线的角速度之比。
2)表示旋转轴:我们选择一个参考坐标系(Spacial或者Boby),并将旋转轴 S 定义为该坐标系中的一个六维向量
a、"S-omega" 表示三维空间中的单位角速度矢量。单位角速度是指在单位时间内旋转的角度或弧长。这个矢量描述了当旋转速度(通常以弧度每秒或度每秒为单位)为1时,物体的旋转方向和速度。(我觉得角速度和旋转速度绝对值是一样的,只不过角速度是矢量,旋转速度是标量)
b、"S_v" 表示三维空间中的线性速度矢量,通常用于描述物体上某一点的速度。在这个上下文中,它描述的是坐标系的原点(frame origin)在旋转速度为1时的线性速度。

3)表示twist:这个theta点我认为是t=1时,旋转了多少度,也是一种速度
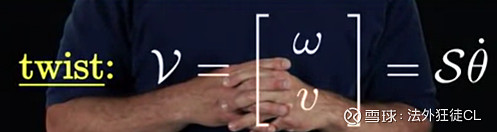
3、总结。V是最后要研究的值,S更像是一个中间变量。
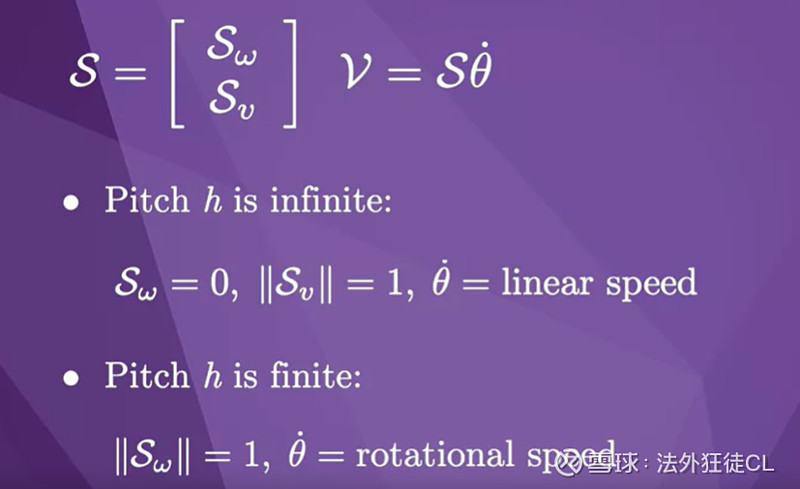
3、twist的类别

我的问题和解答:
1、S表示旋转轴,但是S又可以分为是spacial的旋转轴,和body的旋转轴。这两个有什么区别?
Spatial(空间)坐标系和旋转轴:
Spatial坐标系通常是一个全局坐标系,用于描述世界坐标系或参考坐标系。它通常是一个固定的坐标系,相对于外部环境或世界是不变的。
Spatial坐标系中的旋转轴描述物体的绕空间坐标系的旋转,通常用于描述物体在全局坐标系中的运动。
Body(本体)坐标系和旋转轴:
Body坐标系通常与物体(例如机器人手部、机械臂等)的自身相关联,它随着物体的运动而变化。它通常与物体的几何结构或构造有关。
Body坐标系中的旋转轴描述物体的绕本体坐标系的旋转,通常用于描述物体内部的旋转和运动。
需要注意的是,Body坐标系通常是相对于Spatial坐标系的一个局部坐标系。
另外注意,S可以是screw,也可以是spacial
2、线性速度要怎么理解?
螺旋轴(screw axis)的线性速度描述了刚体绕螺旋轴的平动(线性运动)速度。刚体绕螺旋轴的平动速度是指刚体在绕螺旋轴进行旋转运动的同时,某一点(通常是刚体上的一点)在空间中的线性运动速度。这个线性速度不是沿着螺旋轴的方向,而是与螺旋轴垂直的方向。速度的大小取决于点到螺旋轴的距离。
3、旋转矩阵的角速度和钢体扭转运动的角速度有什么区别?
旋转矩阵的角速度(Angular Velocity):旋转矩阵的角速度通常表示为一个3x3的矩阵,用于描述机器人末端执行器的旋转速度。这个矩阵表示了旋转部分的速度,即机器人如何绕其自身坐标系的轴旋转。通常,它与机器人的姿态变化有关。
Twist中的角速度:Twist是一个6维向量,其中前三个分量表示线性速度(x、y、z方向的速度),后三个分量表示角速度(绕x、y、z轴的角速度)。角速度的这一部分用于描述机器人的旋转速度,即机器人末端执行器如何绕全局坐标系的轴旋转。
Chapter 3.3.2 part 2
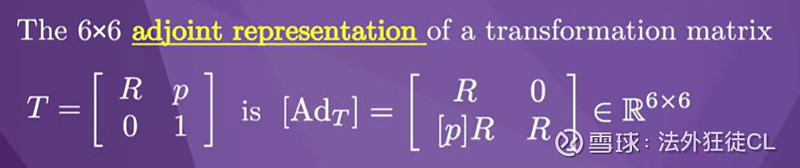
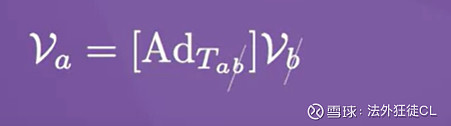
1、V是6维向量,T是四维矩阵,需要转换矩阵做adjoint representaiton的变换,才能运算
2、然后利用抵消法则,从Vb变换成Va
3、表示出 [V], V是6维向量,而 [V]是4*4矩阵。就好像第三周的[omega]是3*3矩阵,而omega是三维向量
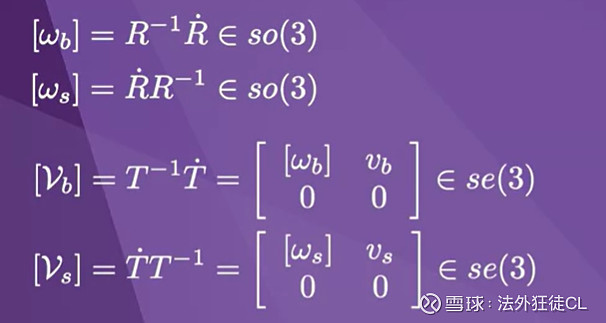
类比于第三周内容,角速度矩阵可以用反对称矩阵来表示。R是个3*3的矩阵,R-点也是一个3*3矩阵。R是旋转矩阵,R-点是旋转矩阵的旋转速度。
左上角的3x3子矩阵表示了角速度的反对称矩阵表示,右上角的3x1向量表示了原点位置的线性速度,以该坐标系为参考。底部一行是四个零。
4、给出se(3)的定义

5、旋转矩阵,和钢体运动的对比
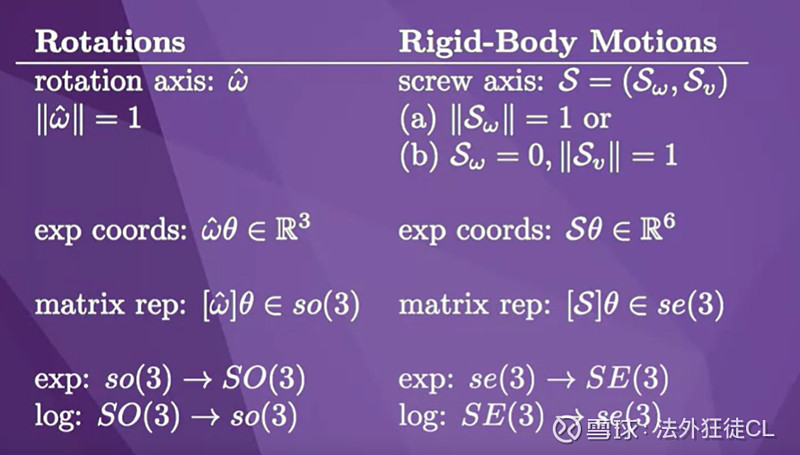
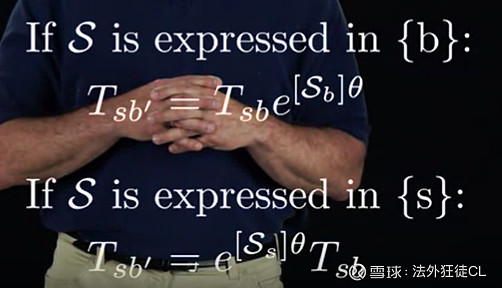
6、se(3)和SE(3)之间的log,exp关系。把se(3),转变为SE(3)。类似于把速度转变为位置。
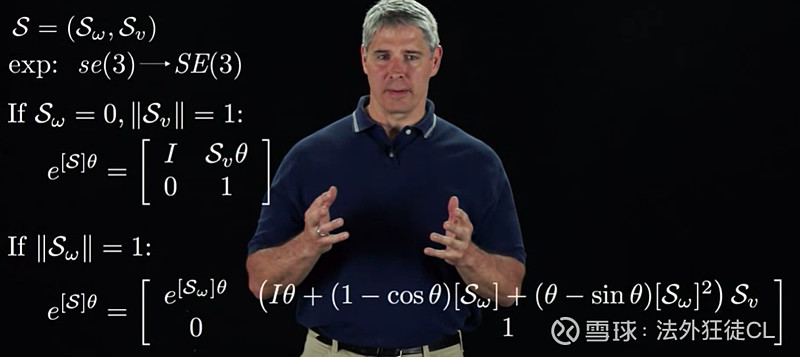
7、exp表示的螺旋矩阵的抵消法则。
8、Wrench 力矩
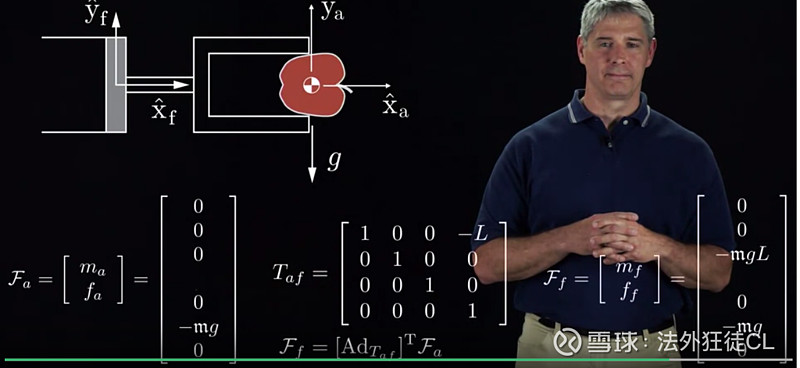
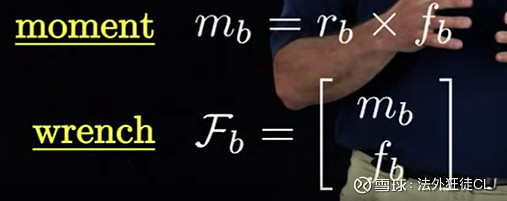
1、定义:描述物体受到的力和扭矩的组合。是一个六维矢量,它将力和扭矩结合在一起。提供了关于物体上的外部力和扭矩如何影响物体的完整信息。
2、表示:
前提:rb是在b坐标系中的一个点,fb是作用在这个点上的力
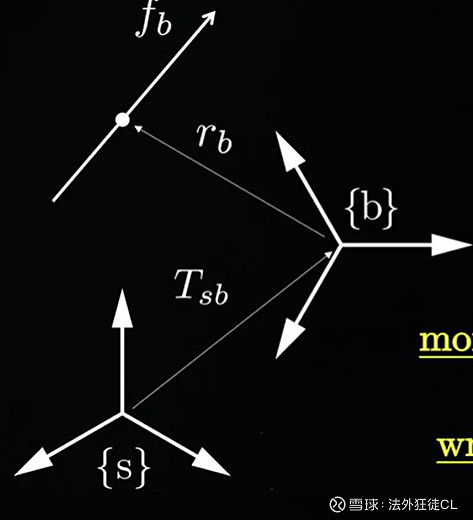
Fb:
注意:mb也是个六维向量,这里是rb和fb的外积,rb是三维向量,表示点的坐标,fb是三维向量,表示fb在b坐标系三轴上的分量。所依Fb是个6维向量
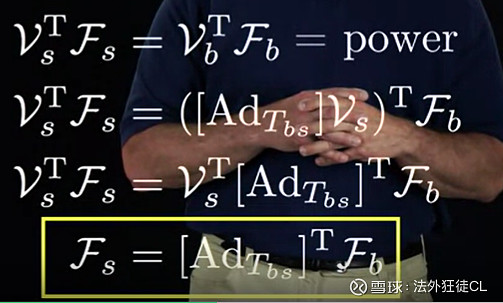
Fs:
注意:
1)power是功率,Vb是角速度和线速度组成的六维向量,Fb是扭矩和力形成的六维向量。
2)AdTbs,是b到s的转化矩阵的Ad变换。
3)转换矩阵T中的R是b到s的旋转矩阵,如果没有旋转,就是identity矩阵(对角线为1,其他为0的矩阵)
例子:
注意:
1)没有扭矩,所以ma都为0
2)从f到a,没有旋转,所以T中的R是identity矩阵
3)p点,可能是f坐标系的原点在a坐标系的坐标?换句话说,f和a相差的部分。这个结论我不确定,就先暂且这样放着。