力传感器是人形机器人感测力和力矩信息的主流选择,可协助机器人完成精细和智能的操作任务,是非常重要的部分。接下来我们主要介绍一下机器人中用到的传感器,特点,以及技术路线的发展方向。
一、六维力传感器
1、背景知识
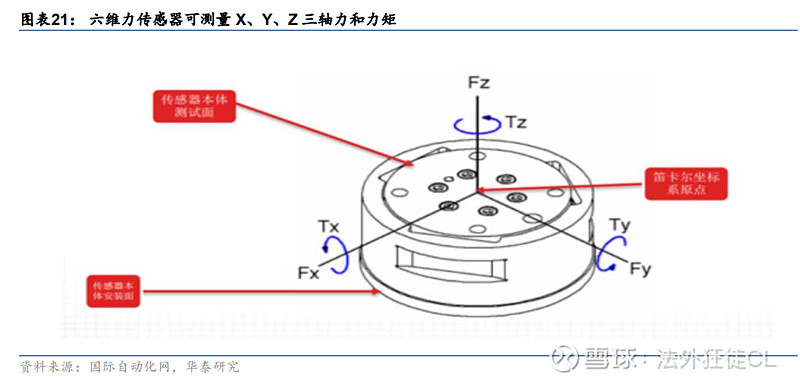
1)六维力传感器是什么:六维力传感器是一类可以同时检测 X、Y、Z三轴方向的力和绕三个坐标轴方向的力矩的传感器
2)六维力传感器用在机器人什么地方?
对于人形机器人末端执行器(如腕部、踝部)在执行操作的过程中,力的方向和作用点都在三维空间内随机变化,测量需要精确处理,六维力传感器更符合需求。
3)六维力传感器有什么优点?
六维力传感器测量维度最高,可以提供最全面的力觉信息,其具有高精度、高灵敏度、快速响应、高耐用性和可靠性的特点,可以轻松检测到微小的力的变化。
2、技术路线
1)六维力传感器的有哪些类型?
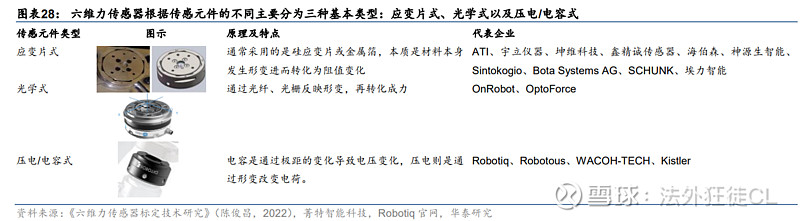
六维力传感器根据传感元件的不同主要分为三种基本类型:应变片式、光学式 以及压电/电容式。目前市场应用的大部分是基于应变片式的测量,其具有灵敏度高、测量范围大、可靠性高、技术成熟等优点。其中硅应变传感器在稳定性、信噪比、刚度方面有比较优势。
a、应变片式可分为金属电阻应变片和硅应变片,当基体受力发生应力变化 时,应变片也一起产生变形,使应变片的阻值发生变化
b、压电/电容式中,电容是通过极距 的变化导致电压变化,压电则是通过形变改变电荷。
c、光学式则通常使用光栅或其他光纤技 术检测光功率并将其转换为电能。
2)不同类型的六维力传感器如何评估:
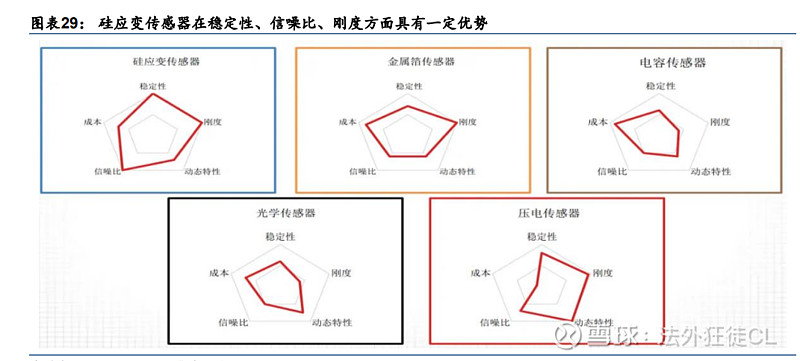
可以从稳定性、刚度、成本、信噪比、动态特性5个方面进行评估。相信会有读者对信噪比和动态特征两个名字感到陌生,稍稍解释一下:
a、信噪比是指应变片在测量中所产生的有效信号与背景噪声的比值,背景噪声是指环境中的各种干扰和电磁噪声。
b、动态性能是指传感器在快速变化的环境中的性能表现。
可以看到,硅应变传感器在稳定性、刚度、信噪比方面表现优秀,动态特征和成本表现良好,是能力比较全面的一种传感器。
3)硅应变传感器的主流技术是什么?
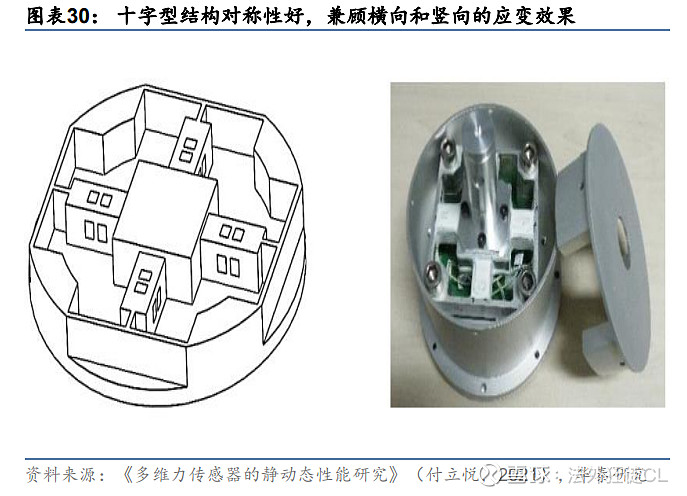
应变片式传感器中的弹性体结构是技术关键,直接影响传感器的灵敏度、刚度、动态性能、维间耦合等关键因素,很大程度上决定传感器性能的优劣。六维力传感器的典型结构设计主要是一体化结构(竖梁、横梁)和Stewart 并联结构。
a、一体化结构(竖梁、横梁)
①十字横梁结构灵敏度高、易加工, 易于标定,但存在维间耦合和径向效应;
②以 Waston 腕力传感器为典型代表的竖梁结构横向效应好、结构简单、承载能力强,但竖向效应差、维间干扰大、灵敏度较低;
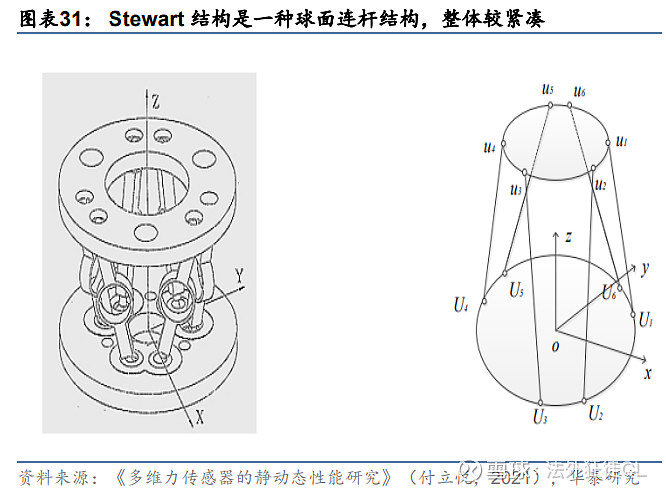
b、Stewart
Stewart 结构是一种球面连杆结构。Stewart 平台中弹性体采用复合式结构,该类传 感器具有结构紧凑、承载能力强、误差不累积等优点。
4)六维传感器未来技术路线
a、技术难点:六维力传感器选型四个核心步骤为确定量程需求——确定使 用环境——确定机械出线需求——确定通讯方式。六维力矩传感器技术难点集中于需兼顾 优良的静态性能、动态性能和低维间耦合。未来六维力矩传感器需要六维联合加载标定设 备等先进仪器、动态特性优化和矢量运算中的解耦算法解决技术难点。
①用六维联合加载标定设备等先进仪器提高静态性能。标定可以简单理解为,加载已知载荷,观察六维传感器输出的原始信号,调整算法参数,建立受力和传感器原始信号的映射关系。现有标定装置存在较多局限性,如加载载荷有限、无法进行复合加载、无法加载所有维度正负方向、 维间耦合较大等。这些局限性因素限制了六维力传感器标定的有效性,影响其最终使用精度,只有采用六维力联合加载标定,才能使传感器的准度更好、串扰更低。
②在实际的力/力矩测量过程中,被测信号大多是动态信号,如机器人打磨抛光时的接触力、物体高速运动过程中的称重和炮 弹发射过程时的后座力等,这些信号属于快速时变信号,动态性能较差的传感器跟踪测量这些信号难度较大。当前业界主要使用优化自身结构、形状等方法提高动态性能,国内外学者还尝试利用动态补偿滤波器、遗传算法、神经网络算法等智能算法来提高传感 器的动态性能。
③理想的六维力传感器,每一方 向输出通道的电压值仅取决于该方向作用力/力矩的大小,与其余五个方向作用力/力矩大 小无关。但是由于传感器的结构设计、机械加工的精度、贴片技术、应变片横向效应与检 测方式等方面的原因,几乎每一维作用到传感器上的力/力矩分量都会对传感器的各路输出信号产生影响,造成维间耦合问题。因此需要解耦算法来对六维力传感器的输出进行解耦, 消除维间干扰,提高传感器的测量精度。但当前对于多维力传感器的解耦问题并没有统一的处理方法,需根据实际情况及传感器结构进行选择和优化。
二、扭矩传感器
1、扭矩传感器是什么?
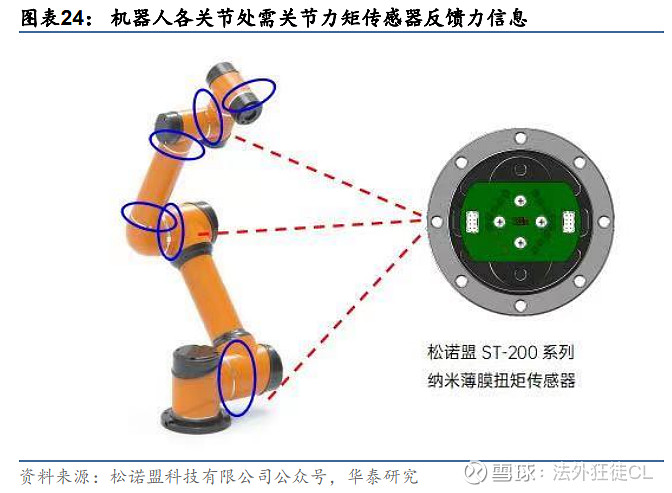
关节扭矩传感器用于形成对机器人单关节力矩的测量和记录。机器人本体感知依赖关节扭矩传感器感测各个关节扭力,获得各个部位受力情况,提供机器人整体的姿态及位置信息。
2、扭矩传感器用在机器人什么地方?
人形机器人旋转、线性执行结构类似于人类关节,对于力的感知相对简单,可采用关节扭矩传感器。
3、扭矩传感器有什么特点?
1)关节扭矩传感器可以实时反馈高质量扭矩信号,迅速识别接触并立即降低力和速度,因为该传感器距离电机较近,避免了机器人机械本体动态特性的干扰,带宽更高,动态响应更快。
2)关节扭矩传感器本质测量一维力,但要抵抗五维力的干扰,抗干扰能力要求高。
三、机器人位姿估计
1、位姿估计是什么?
位姿估计是为了确定机器人在三维空间中的位置(位置)和方向(姿态)信息。在机器人导航、路径规划、物体抓取、环境感知等领域中都是至关重要。
2、位姿估计的技术路线
1)早期主要采用视觉反馈算法估算位姿,但是基于视觉系统的位姿估计算法应用场景受到较大限制,在视觉被阻碍的环境中(狭窄空间进行精细装配或操作)估计结果可靠性较差。
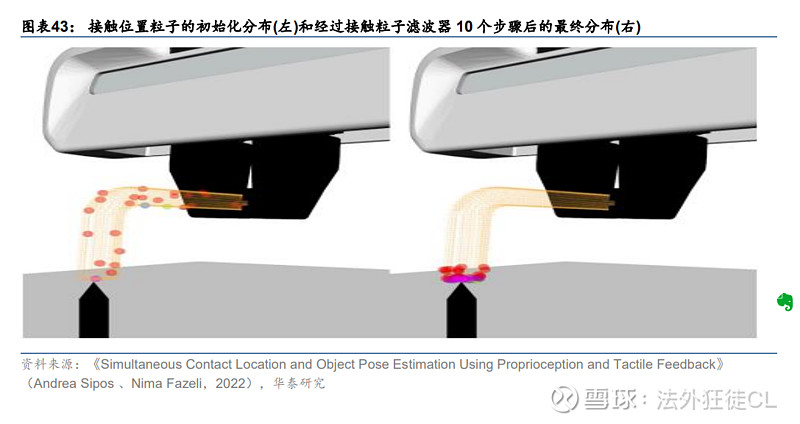
2)六维力传感器搭配关节扭矩传感器提供的本体感知,提出了机器人手部物品姿态估计新解法:2023 年 7 月,RSS 会议上刊登了机器人感知手部物品姿态解决方案的论文,密歇根大学机器人系的 Andrea Sipos 和 Nima Fazeli 利用机器人本体感知(自身关节处扭矩传感器的感知反馈)以及手腕上六维力传感器的触觉反馈,并使用接触粒子滤波器算法,定位接触位置并估计物体姿 态,简称 SCOPE,该方法可精确的完成接触位置的确定和物体姿态的估计,有望推动人形机器人的位姿估计能力。
a、SCOPE方法是什么?
SCOPE 方法是在接收到六维力传感器和关节扭矩传感器的信号数据后,使用接触粒子滤波器处理,完成物体姿态识别。
滤波器算法:以估算接触点位置为例,粒子滤波算法会先假设关于该接触点位置的先验估计分布,可以是均匀分布等,然后根据以上分布,在先前位置附近采样一组粒子,来表示在下一个时间下的接触点位置,当收到传感器给出的新的位置数据时,使用观测数据的似然函数来评估每个预测粒子在给定观测数据下的可能性。这样,观测数据的信息会影响每个粒子的权重。然后基于新的权重,再进行重采样,以选择具有较高权重的粒子。这将使得权重较高的粒子被保留,而权重较低的粒子被丢弃,从而最终实现状态的估计。
b、SCOPE方法的进展
①、Sipos 和 Fazeli进一步于 2023 年 6 月提出 MultiSCOPE,该方法使用本体感知和手腕处六维力传感同时估计两个物体在未知配置情况下被两个协同手臂抓取的姿态。例如,用扳手拧螺丝,机器人既可以通过一只手臂感受到直接接触的扳手形态,又可以通过扳手和另一只手臂上 的力传感器感受到螺钉的状态变化,估计两个抓取物体的姿态,从而完成多任务,提高人形机器人多场景下的通用性。
②在无遮挡场景中,视觉感知方法可以与 SCOPE 共同使用以提高性能:比如机器人可以使用视觉反馈来初始化作用域和初步识别,提高感知效率。
c、SCOPE的发展方向
①、集中于减少收敛到准确的物体姿态估计所需的动作数量和连续的下一 步动作选择算法,以提高机器人抓取物体的连续性和高效性。
②、和六维力传感器相结合
③、在无遮挡场景中,结合视觉感知方法提高性能