不久前,一段搭载华为广告(自动驾驶解决方案)的arcfox alpha自动驾驶体验视频曝光。视频中,该车在一段开阔路段完成了测试,包括避让行人和逆行电动车、红绿灯自动启停、自动转向、路口车辆避让等操作,无需人工干预整个过程。此前,华为副董事长、轮值董事长徐直军曾表示“华为的自动驾驶比特斯拉好很多”,引发热议。现在,车辆的实际性能似乎是真实的。

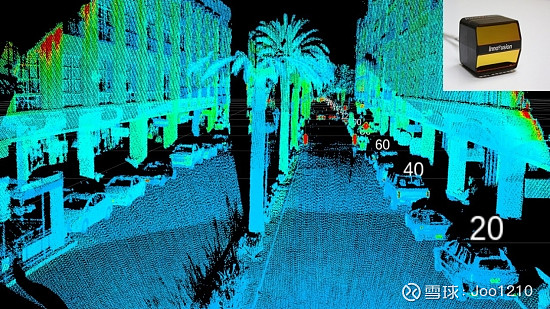
测试视频中的惊人表现很大程度上得益于测试车上的华为3激光雷达系统。众所周知,特斯拉使用的自动驾驶系统并不是基于激光雷达。马斯克还多次批评激光雷达的作用,甚至说“傻瓜只用激光雷达”。特斯拉对激光雷达的痴迷合理吗?
无论是摄像头还是激光雷达,其作用都是代替人眼,让汽车拥有自己的“视觉”。在成像原理上,摄像头更接近人眼,但与人脑强大的后处理能力相比,摄像头更依赖硬件本身的直接感知能力。相比之下,对于透明度高的物体和在极强或极弱光环境中的物体,可能会出现感知错误。此外,该相机没有3D成像能力,其在现实世界中对景深的直接感知能力几乎为零。一旦出现极端情况,缺乏景深判断就会导致严重事故。此前,特斯拉曾发生过自动驾驶事故,原因是车载摄像头识别出卡车的白色货箱在公路上翻滚冲天,导致车辆直奔大卡车而去。此前,特斯拉曾因同样原因被装上大卡车,导致撞车致死。自动驾驶层出不穷,但类似的事件还在层出不穷。
究其原因,还是与毫米波雷达本身的局限性有关。毫米波雷达利用多普勒效应原理感知目标,精度高,穿透力强,抗干扰能力强,但难以区分静态物体。虽然厂商已经通过算法实现了静态物体的识别和校正,但也暴露出另一个问题,那就是毫米波雷达的高度感知能力不强。据了解,毫米波雷达只能提供距离和角度信息数据,无法提供高度信息。对于车身较高的卡车,高度信息的缺失很容易使卡车的数据信息被识别为静态物体并被优化算法过滤掉。总之,大型卡车对特斯拉“视而不见”。

与前两者相比,激光雷达可以感知目标物体的三维结构信息,并对数据进行建模和处理。相对而言,它具有更完整的感知能力。测试视频也证明了这一点。即使是带有“幽灵探测器”和逆行电动车和汽车的行人也可以做出规避动作。但激光雷达也不是万能的。
第一个问题是价格贵,但这对华为来说不是问题——此前,华为在中国汽车工业协会主办的峰会上发布了96线车规级高性能激光雷达,并宣布将降低成本至$200——其次,激光雷达在极端天气下工作能力差,下雨、下雪雾霾甚至最近“卷土重来”的沙尘暴天气都会干扰激光雷达的感知能力。在最坏的情况下,只会返回噪声,这是毫米波雷达的优势。
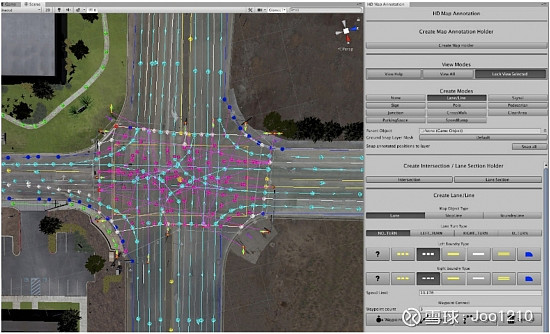
因此,一个完美的自动驾驶系统必然会采用多种感知方式,并通过高精度地图定位进行优化。视频中,中控台平板显示车辆前方导航线,证明测试车辆采用高精度地图。在此之前,蔚来和小鹏的 NOP 和 NGP 功能都依赖于高精地图技术。
虽然有网友在看完视频后表示,车辆转向和加速的调整并不完善,但自动驾驶的发展速度有目共睹。相信在政策的鼓励下,自动驾驶技术将在五年内大规模应用。