$禾赛(HSAI)$ $速腾聚创(02498)$ $纳睿雷达(SH688522)$L3级自动驾驶, 无法替代的激光雷达
【广汽埃安古惠南:今年将是L3的爆发年,2026年将会是L4级的爆发年】广汽埃安新能源汽车股份有限公司总经理古惠南在中国电动汽车百人会论坛上表示,自动驾驶会迎来第二次革命,快速增长。过去几年,自动驾驶很热闹,但是最后没热闹起来,但是平缓期过渡,现在又开始第二轮。“我们预测,今年将是L3的爆发年,看国家产业政策的出台,不管政策出不出台,相关的硬件和软件的技术都会去满足L3在今年诞生。预测2026年将会是L4级的爆发年。”他说。
无法替代的激光雷达
其实,自动驾驶也是对周围环境视觉采集的一个系统,通过多传感器共同协作来完成对驾驶环境的探测,而从现阶段自动驾驶车辆所搭载的传感器来看,通过不同工作类型以及环境,协同完成环境认知。
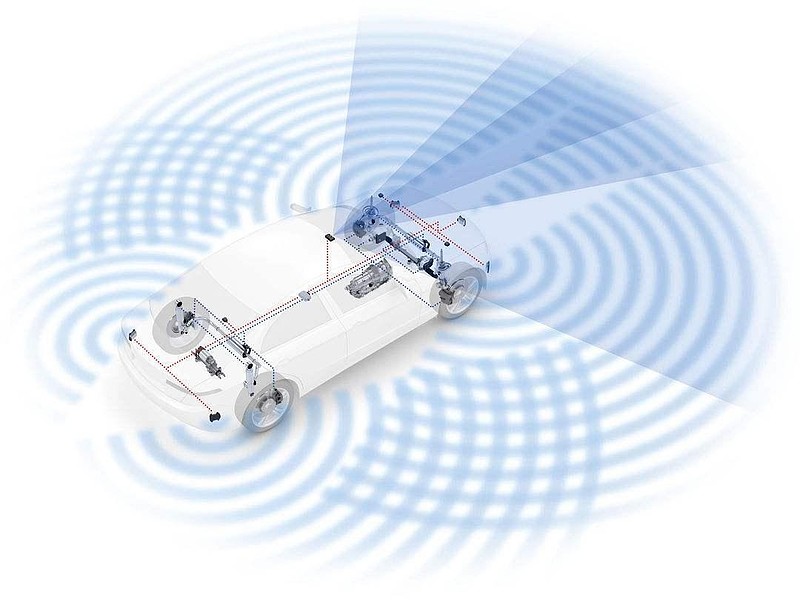
如摄像头,采用光波来探查环境,实现图像识别,而目前市场摄像头传感器分为单目与双目,各具优势,但其精度及对环境的应变能力会受到强光、暴雨、漆黑夜间的影响。

基于摄像头的缺陷,则需要另一种传感器对其进行识别补充,而这就是毫米波雷达。毫米波雷达采用电磁波提供目标物的间距,并且雷达越多,对于环境探测就越精确,但也会提升雷达相互干扰的几率。并且其探测距离非常远,不受雾霾、烟尘等环境的影响,并且具备在白天以及黑夜全天候工作的能力,但探测精度稍差。在L2级自动驾驶中,还是可以忍受的,毕竟,其探测的信息量远低于激光雷达,因此,对于处理器需求也就更低,便于降低成本。
但到了L3级自动驾驶,对于环境精度感知上了一个数量级,因此,无论是考虑全天候还是精度问题,激光雷达是必不可少的一个传感器。而目前汽车业界也达成共识,想要达到L3级自动驾驶,就必须要有激光雷达,不管是作为主传感器,还是作为冗余备份。