23063416
产业链相关公司与 BOM 表成本一览
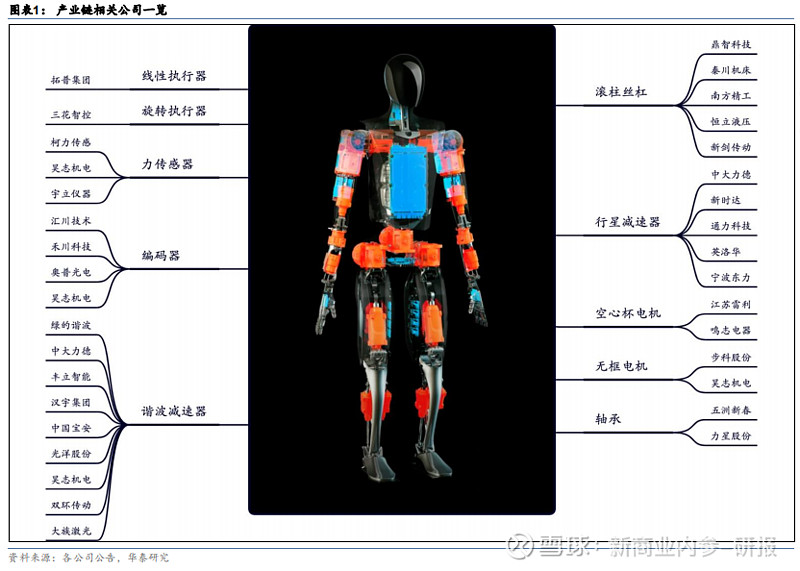
特斯拉机器人快速迭代,通用机器人迎来曙光
通用机器人迎来曙光,已具备协作安全性
快速迭代下特斯拉机器人已能实现行走/抓取等动作,通用机器人迎来曙光。
2021 年特斯拉 在 AI Day 上首次提出其人形机器人 Optimus 的渲染图;2022 年 AI Day 上,特斯拉推出原 型机,在没有外接线缆的情况下实现了缓慢行走与挥手;2023 年 5 月股东大会上,特斯拉 人形机器人已经可以实现流畅的行走与抓取物品,灵活度较原型机大大提高。我们认为人 形双足机器人为通用机器人的最优解,因为人类社会的种种事物都按照人类的生理结构进 行设计的,为了适应种类多样的任务,达到通用的目的,贴近人类形态的双足机器人其隐 形成本最小。

特斯拉机器人力矩控制能力提高,增强协作安全性。2023 年 5 月,特斯拉机器人腿部的末 端关节能够在落地的同时不打碎鸡蛋,也能够轻松地抓取物品,证明其末端肢体关节的力 矩控制能力有了显著的提高,增强了与人协同时的安全性。

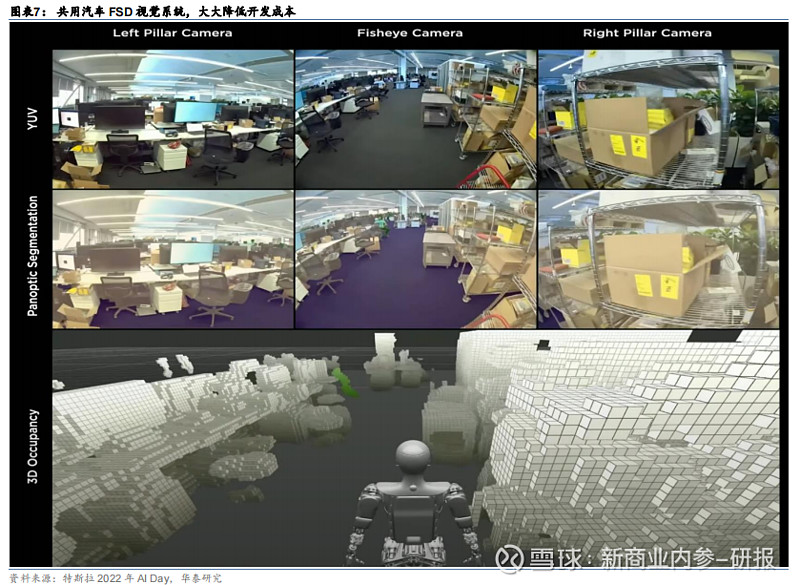
共用汽车 FSD 系统,特斯拉机器人已能够识别、记忆周围环境。通过共用特斯拉汽车上的 FSD 自动驾驶系统,特斯拉机器人已经可以利用视觉自主识别、记忆周围环境,构建地图。 工程师也可以通过 AI 对其进行肢体的模拟训练,大大降低了其开发成本。

旋转执行器、线性执行器、灵巧手共同构建全身 40 个关节
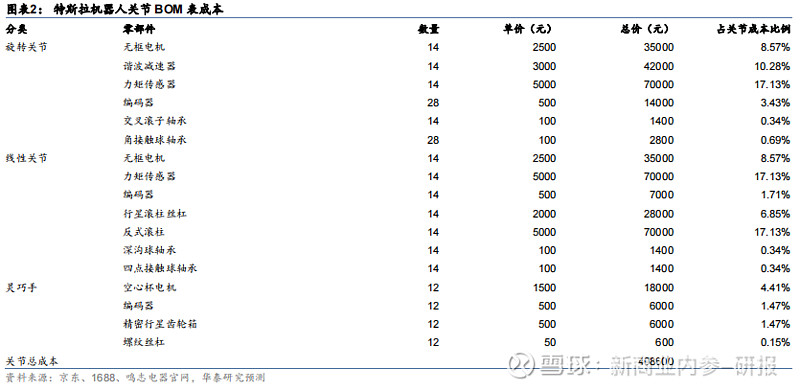
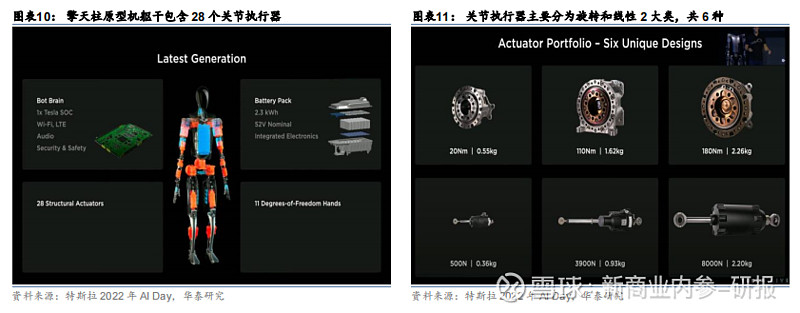
擎天柱躯干包含 28 个关节执行器,主要分为旋转与线性两大类。考虑到成本等问题,特斯 拉设计了旋转和线性 2 大类执行器,每类包含 3 种执行器。擎天柱整体躯干共有 28 个关节 执行器,其中线性执行器 14 个,旋转执行器 14 个。具体应用部位分别为肩部 6 个旋转执 行器、肘部 2 个线性执行器和 2 个旋转执行器、腕部 4 个线性执行器、腰部 2 个旋转执行 器、髋部 4 个旋转执行器、腿部 8 个线性执行器。
力矩传感器、谐波减速器、无框电机和编码器为旋转执行器重要零部件。特斯拉旋转执行 器由角接触轴承、谐波减速器、交叉滚子轴承、编码器、无框电机、力矩传感器构成,其 中编码器、无框电机、减速器和力矩传感器价值量高于其他零部件。

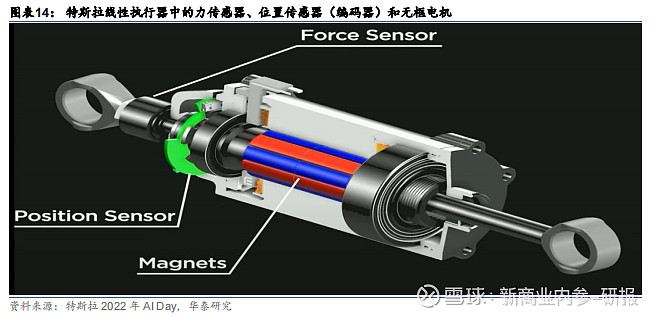
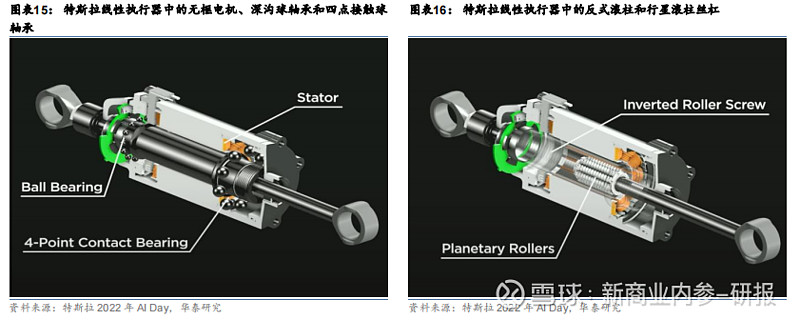
反式滚柱为特斯拉线性执行器中高价值量零部件。特斯拉人形机器人线性执行器由深沟球 轴承、无框电机、力矩传感器、位置传感器(编码器)、反式滚柱和四点接触球轴承构成。
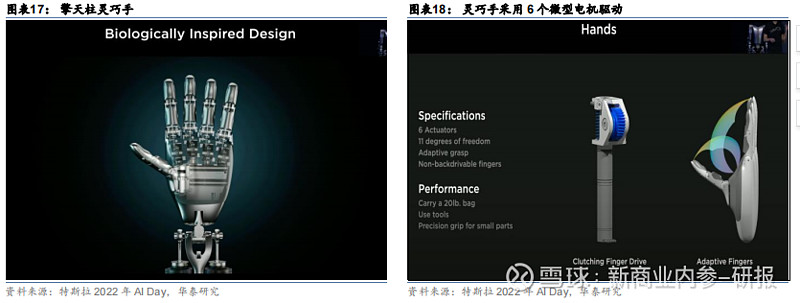
灵巧手采用 6 电机驱动,空心杯电机为核心部件。擎天柱灵巧手采取了较为经典的六电机 布局,其中拇指采用双电机驱动弯曲和侧摆,其它 4 指各用 1 个电机带动,可实现 11 个自 由度。灵巧手主要由空心杯电机、螺纹丝杠、行星精密齿轮箱和编码器构成,其中空心杯 电机为核心部件。算上双手的 12 个执行器后,特斯拉机器人的全身执行器数量为 40 个。
受篇幅限制,仅为部分浏览)
*免责声明:以上报告均为通过公开、合法渠道获得,报告版权归原撰写/发布机构所有,如涉侵权,请联系删除;本号报告为推荐阅读,仅供参考学习,不构成投资建议。