脑机接口系统已被广泛研究,以使患有运动瘫痪的人能够控制辅助机器人设备,取代或恢复失去的功能。日本京都国际高级电信研究所的研究人员开展了一项研究,健康的参与者能够通过使用非侵入性脑机接口来控制类人机械臂并实现多任务处理,在执行目标导向任务的同时使用自己的手臂执行不同的任务。这一研究为探索未来健康人的人体增强应用开辟了可能性,不仅可以增强执行特定任务的能力,还可以扩展同时执行多项任务的能力。
多任务处理涉及同时执行两个独立的任务。使用多余的机器人肢体进行多任务处理不仅可以增强实现特定任务的能力,还可以扩展人类可以同时执行任务的数量。与依赖通过身体部位运动解码的控制信号的协作任务相比,多任务处理需要解码用户的意图,而不考虑身体部位的移动,因为这些身体部位同时执行另一项任务。直接从大脑信号解码用户意图,用大脑控制人体增强装置和多任务处理是人体增强的两个主要目标。
结果
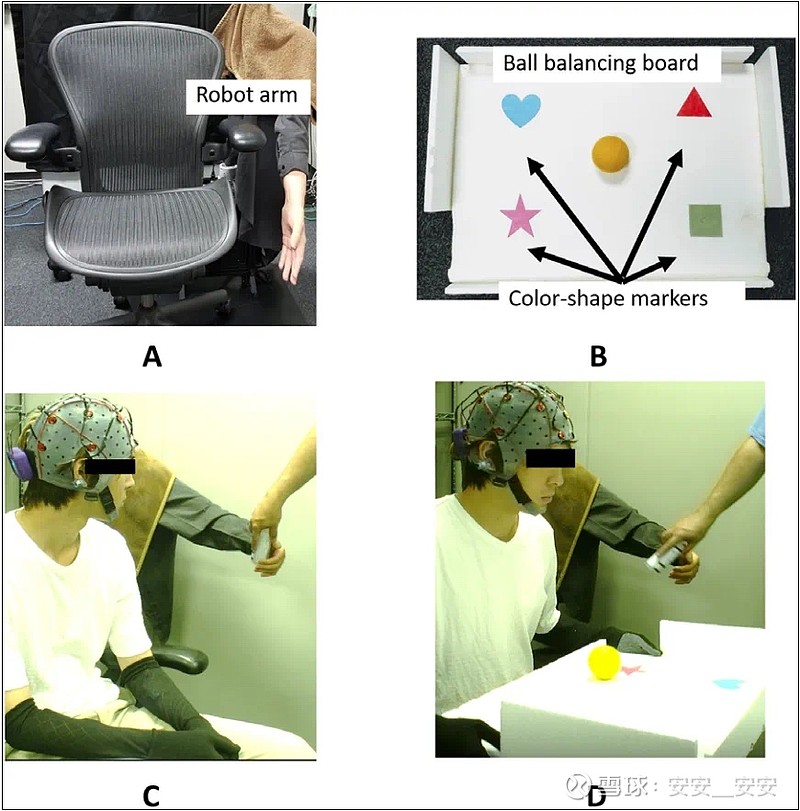
15名参与者进行了这项实验,参与者控制机械臂,并同时执行两项任务:一项任务由机械臂完成,另一项任务由自己的手臂完成。参与者通过想象一个以目标为导向的动作,激活机器人抓住物体,与此同时,平衡手中木板上的球。机械臂放置在参与者旁边,营造一种错觉,即机械臂是从他们自己身体里出来的,如图1A所示。在单一任务下,参与者被要求想象用机械臂抓取或释放瓶子的动作。实验者将瓶子放置在离机械臂很近的位置,以便抓住它,并在瓶子释放时将其拿走,如图1C所示。机械臂具有从静止位置到抓取位置的预编程运动轨迹,该运动轨迹由校准期间选择的电极的功率谱密度控制。在多任务下,参与者必须以与单任务相同的方式控制机械臂,同时平衡放置在板上的球,如图1D所示。
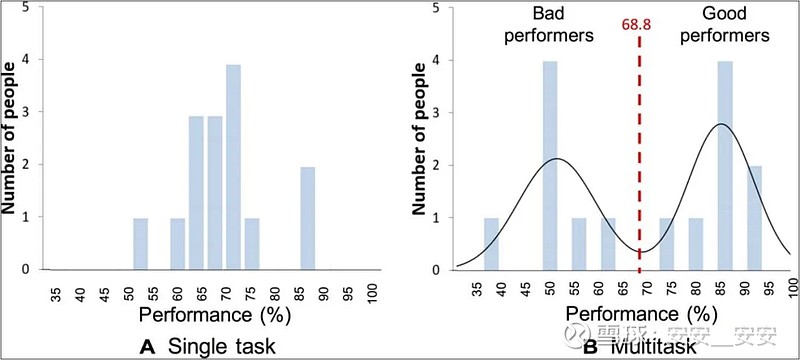
收集了20个试验来评估每个试验的性能。单任务的总体表现为67.5%,多任务的整体表现为72.5%。研究假设单个任务的分布是单峰的,多个任务的分布是双峰的。分为两类人,表现好的人和表现差的人。在实验开始时(基线)、多任务期间和实验结束时执行并评估球平衡任务(图2)。评估指标是通过颜色形状检测算法计算的,该算法跟踪黄色球经过放置在平衡板上的均匀分布的彩色标记中心的次数(图1B)。
讨论
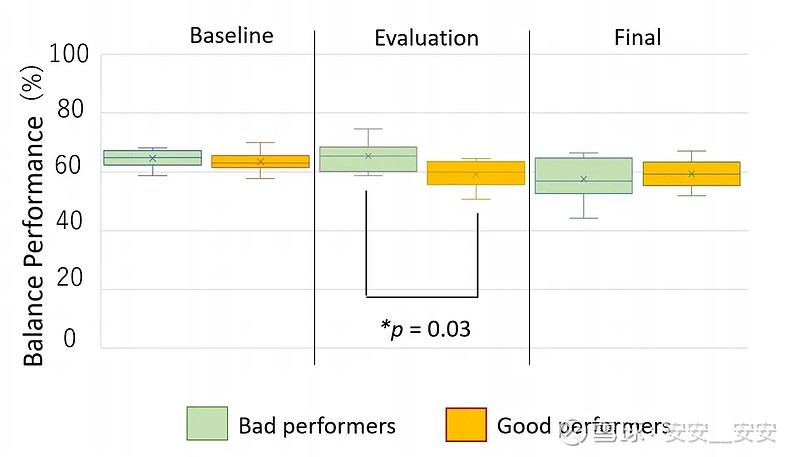
超过一半的参与者能够用脑机接口控制机械臂实现多任务处理,同时用自己的手臂执行另一项任务。对于这些参与者来说,与单一任务期间的大脑激活相比,执行两项任务时的大脑激活更容易区分。另一方面,表现不佳的人未能操作机械臂的原因可能是同时执行两项任务的复杂性,增加了注意力转换的过载。注意力的分散可能不允许参与者同时完全集中在两个任务上,从而在其中一个任务中获得更高的分数,而不能同时在两个任务中都获得好的表现,因此表现不佳的人在多任务评估期间的平衡表现得分更高(图3)。
……省略
展望
此研究揭示了人类大脑不仅能够控制外部设备,而且能够在多任务处理下应对和调整。这为探索未来使用不同类型机械臂的协作和并行任务的其他应用开辟了可能性。另一方面,开发脑控智能机械臂也很重要,这种机械臂具有上下文感知能力,可以补充基于大脑的命令,可以根据上下文(即对象的类型)以不同的方式执行动作(即不同的抓取配置)。未来的智能机械臂将有可能具有识别上下文和优化行为以匹配用户意图的视觉能力。(脑机接口社区)$创新医疗(SZ002173)$ $三博脑科(SZ301293)$ $中科信息(SZ300678)$