【环境感知技术对机器人的作用】
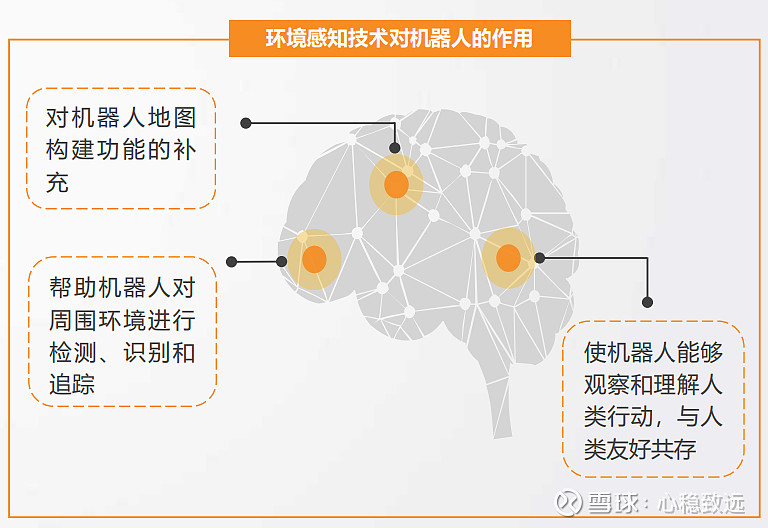
1)环境感知技术作为机器人系统不可或缺的一部分,与智能机器人的【地图构建】、【运动控制】等功能息息相关。一旦机器人失去感知能力 将无法帮助人们完成具体工作任务,因此它是机器人的【感知+运控+交互】技术体系融合发展的基础和前提条件
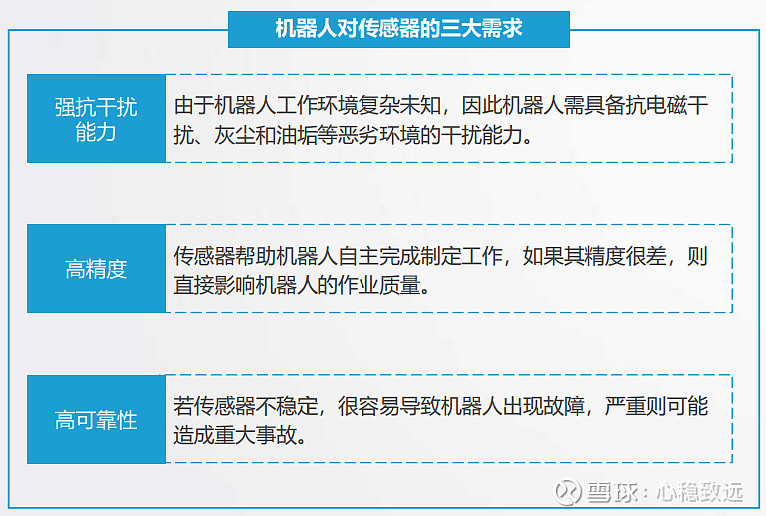
2)机器人的感知功能通常需要通过各类传感器来实现,借助传感器,机器人能够及时感知自身和外部环境的参数变化,为控制和决策 系统做出适当响应提供数据参考。具体来看,机器人的环境感知一般需要应用各类传感器来代替人类感觉,如视觉、听觉、触觉等, 强抗干扰能力、高精度以及高可靠性是机器人对传感器的最基本要求。