其实华为自动驾驶的核心技术理念还是很先进的。
/ “后融合技术在两年以前被我们抛弃了,现在我们全部都是前融合的技术”,前融合从原理上讲是更高级的,2019 年就开始这样做了。
/ “前融合的特点其实是把所有的信息放在一起,送到NN网络里去处理,它并不是一个简单的哪个传感器用哪个信息的问题。”,把什么东西放进去机器求解,这是特斯拉有不一样看法的地方,特斯拉觉得依赖庞大的数据,连空间距离这类信息也应该由机器从视觉信息里面求解 ,华为把毫米波和激光雷达的信息都一股脑加入进去,从原理上特斯拉的方法也是说得通的,但是非常具有挑战性 网页链接,而且看机器视觉的最新发展,这是未来趋势,同时,华为和其他厂商的方法是比较现实和稳重的
/ “毫米波我们是直接把毫米波的原始数据拿过来了,用它的原始点云。”,“毫米波的原始数据是比较脏的,其实比较难处理,我们现在用NN在处理”,不知道华为的视觉数据是怎么处理的,特斯拉抛弃后处理图像,直接用摄像头传感器原始数据 网页链接 ,也是相同的思路
/ “绝大多数那些难以处理的case,你加上80倍的传感器也处理不了。我敢跟你打赌。所以这种乘的算法来做统计的逻辑是很荒唐的。”,现在特斯拉一出问题,指责最多的就是缺这个传感器那个传感器,其实根本的更可能的是特斯拉技术路线上自己要解决的内在问题,正如华为说的,到最后无论多少传感器,有挑战性的地方还是会存在。
----------
对话华为智能驾驶总裁苏箐:华为绝对是第一(@类星频道 写的,为啥微信文章和微博文章这么难被搜到,排前面的全是转载的)
2021年04月17日 网页链接
---节选---
媒体:所以我们远距离是依靠激光雷达?
苏箐:不我们不是这样分的。以前大家老是问一个问题,你们的感知是前融合还是后融合还是什么Redundancy(冗余)的技术?
首先我觉得传感器没有Redundancy这一说,这是胡扯。然后后融合技术在两年以前被我们抛弃了,现在我们全部都是前融合的技术。
前融合的特点其实是把所有的信息放在一起,送到NN网络里去处理,它并不是一个简单的哪个传感器用哪个信息的问题。你也可以简单理解为传感器之间互相会有Attention机制。
另一个,不同传感器的特点是不一样的。举个例子,毫米波速度敏感,但测量一塌糊涂,视觉对语义测得比较好;激光对几何测量是比较好的,它本身会把这些融合在一起。
毫米波我们是直接把毫米波的原始数据拿过来了,用它的原始点云。
媒体:找供应商拿原始数据会有难度吗?
苏箐:两个问题,第一大部分Tier1不愿意开放原始数据给你,但华为比较大嘛,人家也愿意开放,第二其实毫米波的原始数据是比较脏的,其实比较难处理,我们现在用NN在处理。
媒体:双目做激光的冗余吗?
苏箐:这个东西不能叫冗余,其实不同的传感器,不同的表现、优劣是有一个波动的。
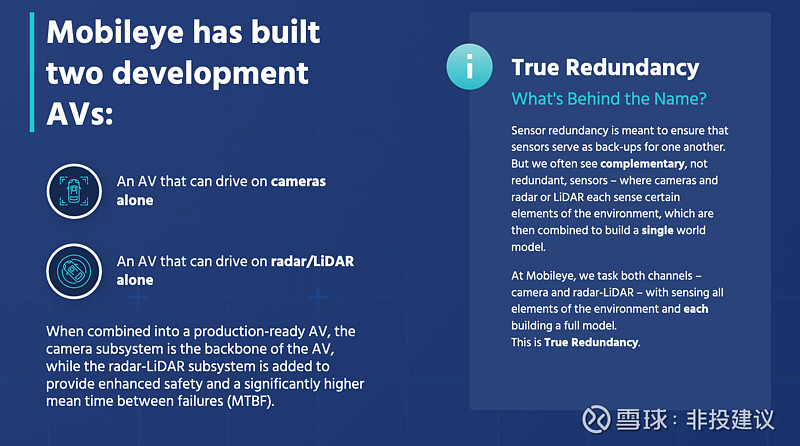
媒体:有一家头部自动驾驶公司提出了真冗余,把雷达、LIDAR作为一个子系统,把纯视觉作为一个子系统,独立测试,两个子系统接管率相乘来实现统计学意义上所需测试里程的降低。
苏箐:坦率的说,我猜那个是他们Marketing写的,绝对不是他们研发写的,否则我就要怀疑他们的研发能力了。真正决定你接管率的,绝不仅是你的感知系统,跟你的规控关系非常大,甚至比感知系统还要大。
这些系统是没有你所谓的真冗余设计的对吗?
第二,绝大多数那些难以处理的case,你加上80倍的传感器也处理不了。我敢跟你打赌。所以这种乘的算法来做统计的逻辑是很荒唐的。
真冗余是很Marketing的说法,你要把感知做好,你就应该做传感器融合,而不是做冗余,做冗余是对传感器很严重的浪费。他们的技术水平绝对不是这样。