
引
言
大陆的短距离激光雷达SRL1是用来检测碰撞的,主要是给Volvo之前的系统中使用,这款短距激光雷达SRL1提供基于红外激光技术的紧急制动辅助功能,无需任何机械运动部件固态LiDAR。
01
激光雷达SRL1
激光雷达SRL1的红外激光光源来自欧司朗(OSRAM)的InAlGaAs / GaAs量子阱结构激光光电二极管。这款激光雷达采用了红外激光脉冲的飞行时间测量方法,测量潜在威胁物体的相对距离、相对速度和横向偏置。如下图所示选择光电二极管主要考虑降低成本,又能够准确测量物体的距离。

图2 主要光学结构的位置
如下图所示,整个SRL1主要分为主板、次板、FPC连接器、上下外壳、两个透镜和激光二极管。
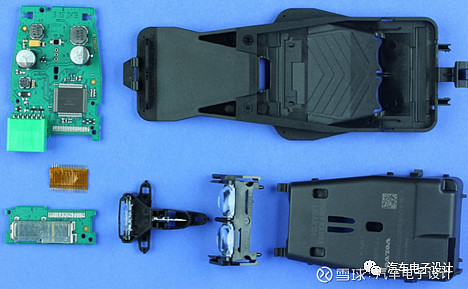
图3 主要部件的分解图
主板和次板是通过软连接的方式进行的,形成以下的结构方式。

图4 激光雷达SRL1分解图
02
主板的主要电路
激光雷达SRL1分两块板子,如上所示插接的形式组合在一起,主板采用飞思卡尔处理芯片组和专用集成电路(ASIC),主要的器件如下表所示,整体的功能是比较简单的。主要包含单片机、电源管理、光电二极管驱动、CAN收发器、MOSFET和Time to Digital Conveter这几个部分。
表1 SRL1主要元器器件
功能
厂家
标号
单片机
NXP
MC9S12XEG128MAA
电源管理
STMicroelectronics
L9884-ICJJ JJV2
CAN收发器
NXP
TJA1042 (x2)
光电二极管驱动
AMS
Time-to-Digital Converter
AMS
主板的尺寸为73.76mm和50mm,采用四层板的工艺。
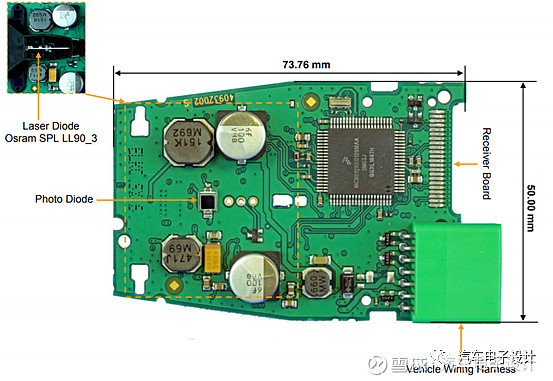
图5 SRL1 主板正面
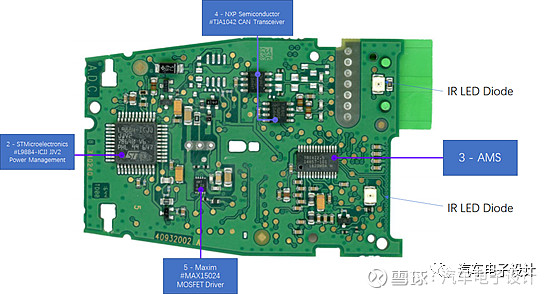
图6 SRL1主板反面
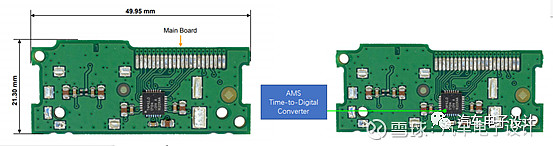
图7 SRL1辅助连接板

小结:这个部件比较简单,应用范围也非常有限,其实我们可以期待下后续的长距离固态激光雷达的结构。