

| 发布于: | Android | 转发:5 | 回复:41 | 喜欢:7 |
我看了下评论,提到很多复杂的场景例如井盖,气球无穷无尽怎么识别完。恐怕这些复杂场景对于普通人也很难看得清。自动驾驶不是现在要实现100%的0安全事故,而是要实现比人类驾驶更安全。
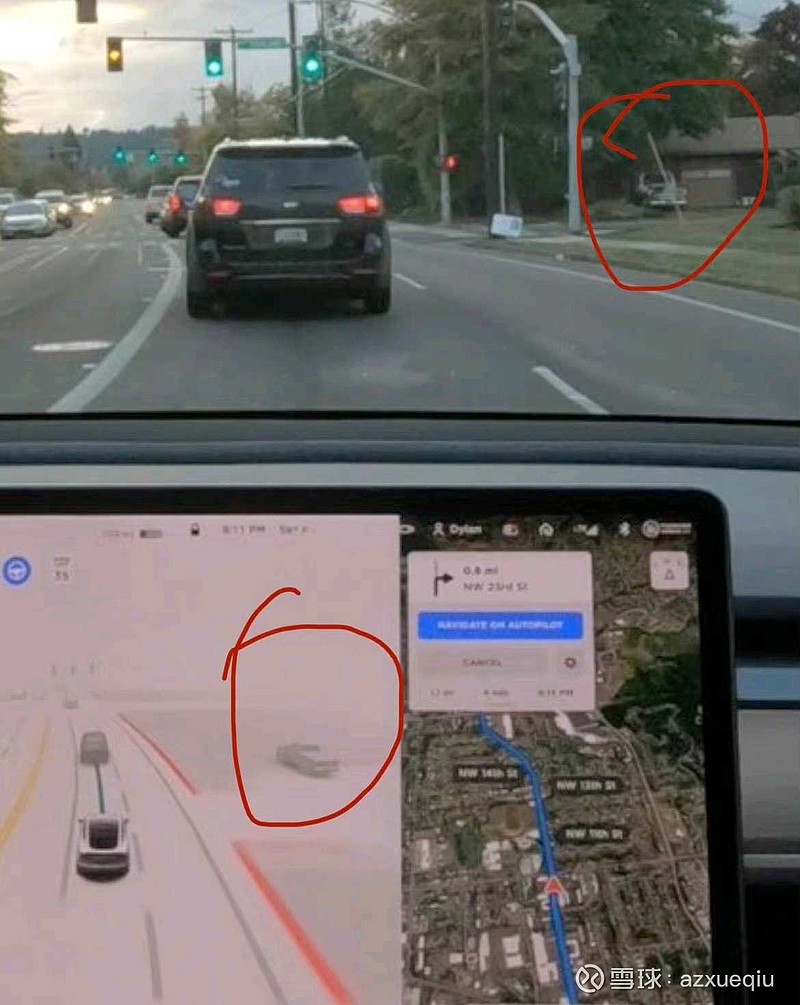
视觉方案就是骗人的本来L2,非说是L4,空中塑料袋,落叶,地上倒影,水洼,路边广告特定图案。这些场景更本无法穷尽。光影的变换无法靠穷举解决,就像那些光影的魔术人眼都能骗过,何况摄像头。也许一直没事,但有一天特定光影就要你的命。
是啊,识别技术挺高。但问题是,看见了不刹车啊。你说怪不怪。
马斯克三季度业绩会表态说,要无偿公开无人驾驶系统的技术专利,实现推动新能源汽车的整体发展的愿景
中国路面上井盖都是凸起的,特斯拉没有办法
视觉识别不是一本通。。。这个车道级精度构建的任务目前来看应该是高精地图主导。识别需要激光雷达,毫米波雷达,视觉识别协同,三者缺一不可。没必要狂吹视觉识别
最早的时候,人类还拿算盘吊打那个半栋楼大小,还总运算出错的计算机。一些人拿着算盘沾沾自喜,放出话这种电子废物永远不可能可靠,算错了帐计算机替你坐牢? 今天看这种人就是傻波一。
早就追不上了。特斯拉视觉战略天下第一。
你在大街上走,通过摄像头识别并定位你的技术5年前已经很成熟了。