前言总结
在去年易行机器人升级了全新的技术战略,升级到软硬本全生态发展,其中软件作为我们重要的战略组成部分,也在控制器平台内做了全面升级。
平台软件应用
EGO-ROBOTICS

通过图形化的方式对机器人(AGV/AMR)控制逻辑和应用功能进行设计,来展开应用软件的针对性完善升级,提高机器人的使用价值。
构建、编辑应用地图
使用地图管理功能,控制车辆投入现场使用环境,让机器人对现场环境进行认知,自动绘制现场地图,最大支持400000平方米地图。使用工具可对地图上无用信息进行擦除,让地图构建更加精准、方便。不同地图还可做拼接、叠加和切换,实现多楼层、多区域之间自动导航行驶。
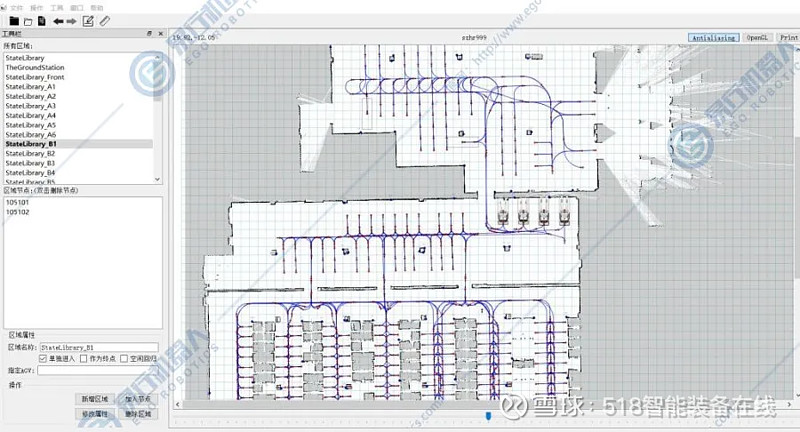
地图构建展示
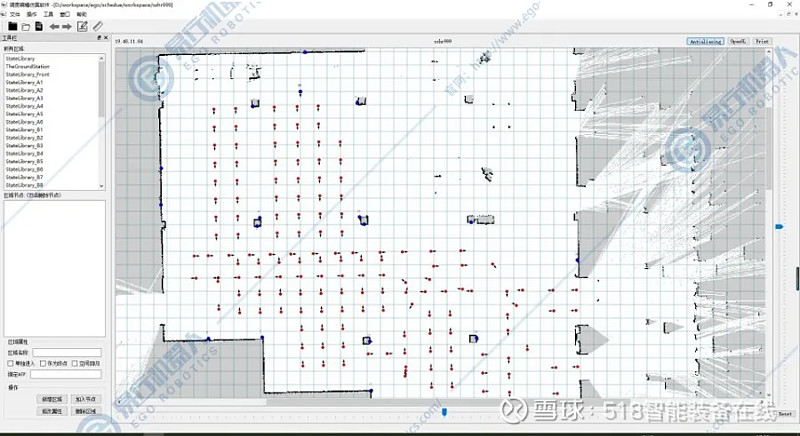
地图标点展示
调度任务配置
根据需求,可由客户自己针对多楼层大区域作业场景调整分配机器人的作业情况,包括任务执行时间、出库、入库、回流、其他特殊的任务。在同一地图上不同导航方式、不同类型、不同路径的机器人,也可基于机器人的车辆分配、交通管制和协调避让,实现运输优化和仓库规划。

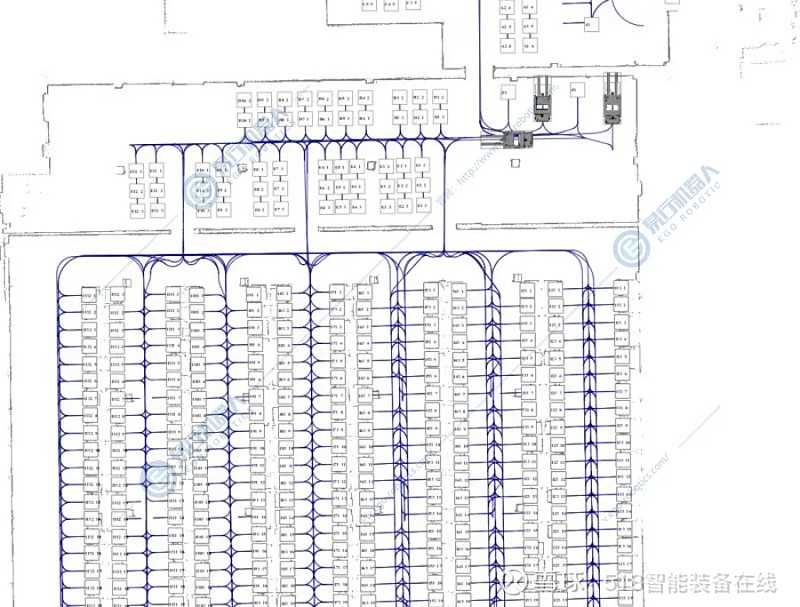
路径规划和单机任务
根据用户需要,对已知地图进行路径点、路径、避障区域、检修区域、交通限流区域等的规划,完成配置下载地图至控制器,机器人即可按照控制器内置地图执行任务。也可直接在显示屏上快速绘制路线,无需上传等待,即时生效,满足机器人离线单机作业。
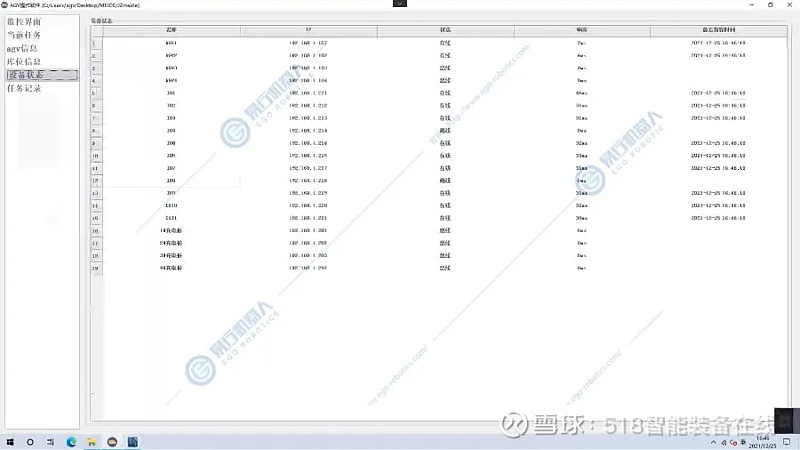
agv状态展示

agv信息展示
软件对接管理
EGO-ROBOTICS
中央调度融合:基于跨不同操作系统平台的监控架构,可与MES、WMS、ERP等系统无缝对接。实现各种类型智能机器人的任务分配、路径规划、调度协调、交通管制、运行维护和监控显示等功能,同时管理现场各类型智体(工业机器人、产线、门控、电梯、PLC等)的协同工作。
二次开发平台:
通用系列控制器拥有方便易用的二次开发平台,提供自然导航、激光导航、二维码导航等多种导航方式,支持两驱差速、四驱差速、单舵轮、双舵轮、三舵轮、四舵轮、差速总成、麦克纳姆轮、其他定制化底盘等方式。可应对全场景复杂化的环境要求,实现自主导航行驶功能。
开放软件生态:
为帮助机器人适应客户对灵活快速部署的需求,易行的控制器采用了开源框架,外设硬件代码开源,为使用者提供非常方便的二次开放环境。

·软件终端产品介绍
自主研发的ECO400/ECS100通用运动控制器,适用于多种类型的移动机器人产品。
该运动控制器采用工业级芯片,兼容多种通信协议,包括CAN总线、TCP/IP网络协议;外接口丰富,可接多种传感器(激光导航雷达、导航相机、防撞激光头、超声波、直流/伺服电机驱动器、舵轮等);外接设备采用线束设计,使机器人布线整洁美观,组装简单,容易维护。
-简单易用-
-开源方便-
-认证服务-