7月14日,全国大学生机器人大赛ROBOCON决赛在南京理工大学江阴校区举办,本次大赛共有92所院校的133支队伍参赛,共设置三大赛项。分别为颗粒归仓、仿生足式机器人挑战赛以及机器人排球挑战赛。经过数日的激烈角逐,电子科技大学LIMITI战队在“颗粒归仓”项目中以550分的总成绩夺得本届ROBOCON大赛的全国总冠军,仿生足式机器人挑战赛以及机器人排球挑战赛的冠军分别为北京科技大学代表队和大连工业大学代表队。

电子科技大学LIMITI战队(图片来源:ROBOCON官方)
赛后,机器人大讲堂第一时间采访到颗粒归仓总冠军电子科技大学LIMITI战队、哈工程战队以及仿生足式机器人挑战赛武汉大学机器人队在内的多支优秀战队,并邀请团队分享参赛机器人设计理念以及运控协同算法的核心思路。
▍电子科技大学LIMITI战队R2机器人设计理念与核心技术分析
电子科技大学LIMITI战队R2机器人主要由底盘、机械臂和交接机构三大核心单元构成,每个部分都承载着独特的功能与设计理念。
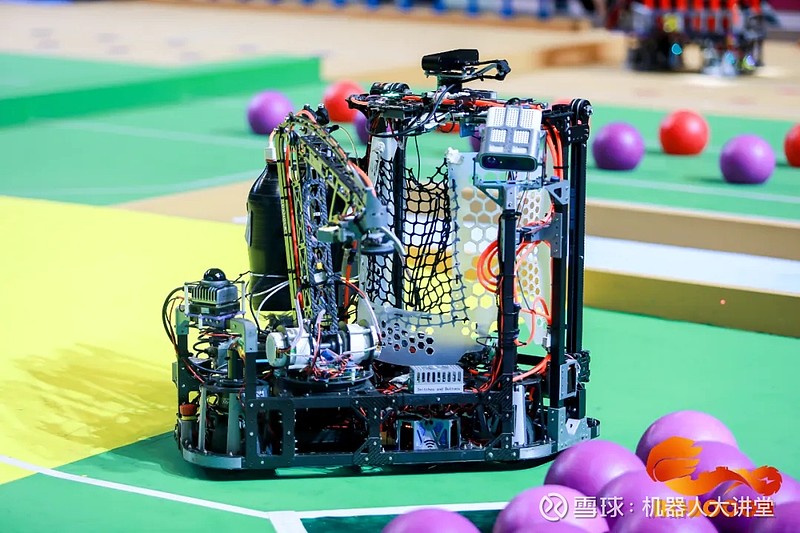
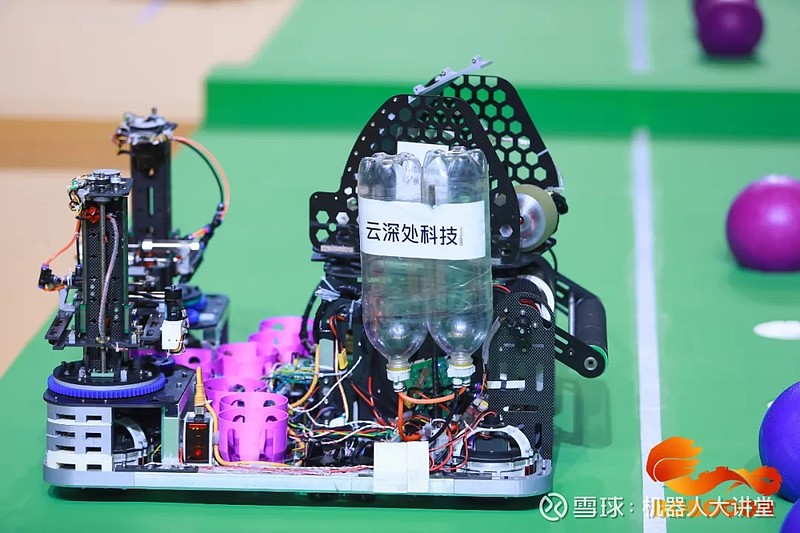
LIMITI战队R2机器人特写(图片来源:ROBOCON官方)
底盘负责R2机器人的整机移动任务,通过PID运动控制及路径实时规划算法,完成本体能精准地移动到各个目标任务点;机械臂部分主要负责在任务点的精准操作,对多关节机械臂的任务规划及运动学逆解实时算出机械臂各关节的运动输出,保证末端执行器合理、及时且精准地运送到任务所需位置。
LIMITI战队R1机器人与R2机器人高效协同作战
(图片来源:ROBOCON官方)
而交接机构则利用光电门的中断信号,来执行接收动作,确保交接过程的顺利进行。
R2机器人精准投放篮球(视频来源:ROBOCON官方)
值得一提的是LIMITI战队在关节驱动单元上,选择了云深处J60系列关节,在保证机械臂轻量化的同时为R2机器人提供了强大的动力支持。
▍哈工程战队R1机器人创新结构与先进算法解析
哈工程战队R1机器人分为全项移动的舵轮底盘,夹苗机构和取球发射机构组成。两个上层机构分时和底盘配合,相互之间不会形成干扰。发射机构采用的是摩擦轮发射方式,上边搭载云台,使用滚筒同步带吸入球体。这样的吸球方式能够最大限度地保证取球路径的控制冗余量。

哈工程战队R1与R2机器人(图片来源:ROBOCON官方)
同时上下单轮设计能够使球在管道运动内有自旋,能够在球触地瞬间抵消球的弹力。夹爪采用三轴正交机械臂,采用云深处的J60系列关节作为偏航角控制模块。

哈工程战队R2机器人特写(图片来源:ROBOCON官方)
哈工程战队R1机器人特写(图片来源:ROBOCON官方)
通过获取关节的力反馈可以判断是否发生了卡苗现象,有效地保护了机械结构。同时底盘采用了先进PID加前馈控制,并且采用了局部路径规划算法,保证底盘能够准确快速地到达指定位置。
▍武汉大学机器人队通过高性能关节 实现四足机器人越障精准控制
ROBOCON大赛中仿生足式机器人挑战赛也是亮点之一,这个挑战赛不仅考核四足机器人的运动稳定性、灵活性、环境适应性、智能性和可靠性,还通过室内竞速赛、室内障碍赛和室外越野赛等多个赛项来全面评估参赛机器人的性能。
武汉大学机器人队表示,在该队参赛的四足机器人设计中,关节的选择和安装是关键点之一。该团队选择了高扭矩、低转速的云深处关节,云深处关节具有稳定的输出和较高的效率,非常适合四足机器人的运动需求。
八自由度串联四足的每条腿上都装配有两个J60系列关节,分别用于驱动膝关节和髋关节。这些关节通过精密的减速器和传动结构,将关节的转动转换为稳定、平滑的腿部运动。在关节高精度编码器的帮助下,在主控板与关节之间使用CAN通讯可以实现对每个关节的精确控制。通过这种方式,能够实时监测并调整每个关节的工作状态,确保在长时间运行中依然保持高效、稳定,使得四足机器人能够在复杂环境下保持平衡并灵活移动。
J60系列的高峰值扭矩和能量密度为足式机器人提供了强大的动力支持,能够轻松应对高强度的工作。在开发过程中,J60关节的可靠性和稳定性表现突出。即使在长时间高强度负载下,也没有出现过热和性能下降的情况。云深处提供的调试软件和开发工具也很方便。软件支持CAN通讯和串口通讯,提供了CAN通讯协议以及基于C语言编写的SDK和使用例程。降低了开发难度和成本,让团队能够更专注于机器人的功能实现和性能优化。
▍参赛团队更加关注硬件结构的稳定性与可靠性
通过观察不难发现,以上参赛的三组队伍当中,同学们不约而同都选择了云深处J60系列关节产品,其中J60-10关节高达30.50Nm的峰值扭矩和15.49rad/s的峰值转速,并且峰值扭矩重量比可达56.48Nm/kg,在保证机械臂轻量化的同时为参赛机器人提供了强大的动力支持。
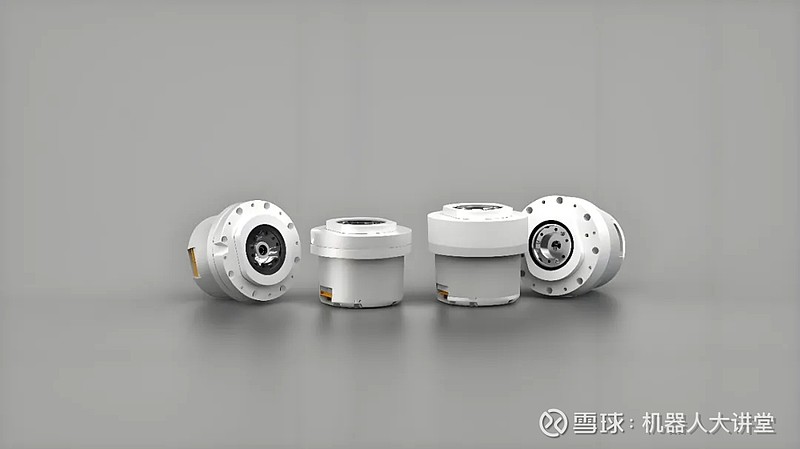
此外,J60系列关节的通信协议简单清晰,配置起来非常方便。更重要的是,该款关节基于CAN通讯协议,这意味着更多的设备可以控制这款关节,极大增强了机器人的兼容性和灵活性。
不少参赛团队表示,ROBOCON大赛的很多竞赛环节需要考虑机器人的运动精度以及关节长时间高爆发下持续输出的稳定性,避免因过热影响机器人比赛输出。因此稳定性与可靠性是这些参赛队伍必须考虑的因素。

纵观整个关节市场,能够提供峰值扭矩30.50Nm,并且兼顾轻量化、稳定性的产品并不多。云深处J60系列关节在所有竞品当中脱颖而出。更重要的是,该款关节已在绝影Lite3四足机器人上得到产品级应用及验证。
对于开发者而言,设计成本也是战队需要考量的重点,尤其对于个体开发者而言,采购成本往往是限制机器人性能的关键因素,在淘宝云深处科技店铺,J60-10关节零售价格为1599元,高校特惠价仅需899元(截止到8月31日),并且集成减速器、无框力矩电机、伺服驱动器、绝对值编码器于一体,结构紧凑,集成度高,大幅度节省安装空间,对于中小开发者团队非常友好。
▍全国多个知名战队均在使用云深处J60系列关节
打开B站,越来越多的开发者参与到云深处关节的讨论当中来,如果仔细浏览,我们不难发现,除电子科技大学LIMITI战队外,哈工大竞技机器人战队,北交RTS机器人战队等多家战队同样采用云深处J60系列关节,并线上分享了开箱视频。

从整体反馈来看,各大战队均对云深处J60系列关节予以肯定。在性能表现方面,各大参赛队伍认为云深处J60系列关节性能充沛,能够满足赛事对于机器人高爆发和稳定性输出,这一点不管是单关节表现或机器人整机表现都十分出色,此外易用性方面,云深处J60系列关节由于采用一体化关节设计,整机化程度高,能够极大缩减了前置工作周期,能专心投入到关注的整体研究。

此外,在反馈当中,各大参赛队伍也根据实际使用情况,针对一些细节上提出了改进意见(例如操作引导手册、交互方式细节等),随后云深处工程师也会针对用户反馈意见较为集中的问题进行评估和产品优化。
▍结语与未来:
截至记者发稿,云深处J60系列关节上市已三个月有余,纵观J系列关节来看,J60系列关节当仁不让成为性价比王者,在四足机器人与中小型竞技类机器人当中表现出色。

时至今日,云深处依然秉承“成熟实战后转化”的思路设计产品,确保终端开发者用到充分实战验证过后的关节产品。另据知情人士表示,云深处将在持续更新J系列家族产品线,扩充J关节家族阵营。