作为软体机器人领域的重要分支,TSM软机械手凭借其仿生设计,展现出高安全性、紧凑性、灵活性和灵巧性。这些特性使其得以在水下作业、医疗手术、柔性假肢及人机交互等多个领域得到广泛应用。
然而,其高度非线性的物理模型仍面临技术瓶颈,这一问题严重限制了性能的进一步提升。
为克服这一挑战,研究人员在机械设计和控制方法上进行了深入研究,并在机械设计领域创新性探索了气压内在驱动、电缆肌腱外力驱动及混合驱动等多种模式,发现了每种模式的独特优势与局限性。在控制策略方面,虽然传统的基于模型的方法取得了一定的成效,但在应对复杂多变的实际环境与未知扰动时往往表现不足。
无模型方法及基于机器学习的新策略,可以通过数据驱动的方式提高控制精度和适应性,因此备受研究人员关注,但同时也仍面临提高精度和增强抗干扰能力的挑战。
▍多校联合,成功研发TSM
前不久,来自哈尔滨工业大学机器人技术与系统国家重点实验室、新加坡国立大学和上海交通大学的研究人员对此联合展开了深入研究,并受大象鼻子启发,提出了一种新型的缆线-气动混合驱动锥形软体机械手(TSM)的设计和控制方案,以显著提升机械手在实际任务中的性能表现。
该研究开创性地将鲍登管作为驱动肌腱融入设计之中,进而构建了鲍登管与缆线肌腱(BTCT)相结合的复合结构,这一创举不仅丰富了软体机械手的驱动机制,还通过混合驱动拮抗原理的巧妙应用,实现了BTCT与气动锥形波纹管(PATB)的紧密集成,构建出紧凑而高效的TSM系统。这一设计赋予了TSM卓越的抗轴向拉伸、切向弯曲及扭转能力,极大地增强了其刚性与灵活性之间的平衡。
为了精准模拟并优化TSM的逆运动学性能,研究团队采用了前沿的深度学习神经网络(NN)建模技术。更进一步,为实现运动控制的高精度与稳定性,他们精心设计了闭环迭代反馈控制器(IFC),该控制器集成了三种先进算法,并有效融合了尖端传感器提供的实时位置与方向反馈,确保了机械手在执行任务时的精准无误。
实验结果显示,TSM在空间点定位任务中,于稳定区域内的平均误差仅为0.17mm,在圆形轨迹跟踪测试中历经100次反复试验,其平均误差维持在0.87mm,且标准差仅为±0.57mm,此外,其方向控制误差也严格控制在1度以内。该系统不仅展现出极高的控制精度,还具备强大的环境适应性与鲁棒性,具有在复杂多变现实环境中执行高精度任务的巨大潜力,有望成为未来人类作业环境中不可或缺的安全协作伙伴。
该研究成果的相关论文已以“Disturbance-Adaptive Tapered Soft Manipulator with Precise Motion Controller for Enhanced Task Performance”为题发表在《IEEE Transactions on Robotics 》杂志上。哈尔滨工业大学为论文第一单位,论文第一作者为博士生李相龙,新加坡国立大学博士生熊泉为论文共同第一作者,通讯作者为机器人技术与系统全国重点实验室副主任朱延河教授。共同作者包括哈尔滨工业大学机器人研究所所长赵杰教授,上海交通大学自动化系教授王贺升,哈尔滨工业大学郑天骄副研究员,季华实验室隋东宝博士,哈尔滨工业大学博士生张清华、李洪武、硕士生王子齐。
接下来,一起来和机器人大讲堂深入探索这一研究成果!
▍TSM的结构设计与混合驱动原理
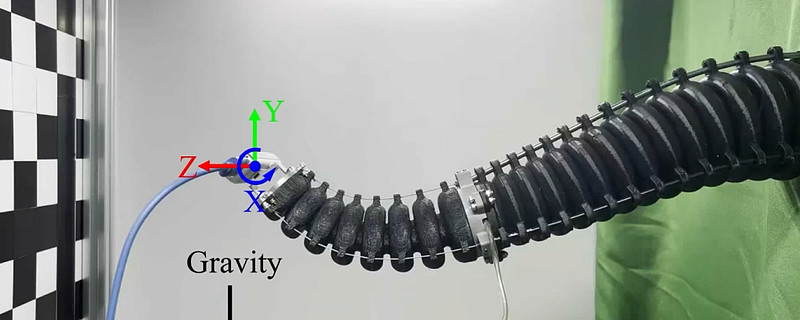
在结构设计方面,TSM的设计灵感来源于大象的鼻子,旨在实现即使在受到扰动(例如重力、摩擦力、外部负载和环境噪声)的情况下也能保持高运动精度。为了达到这个目的,TSM的基础部分需要具有很高的刚度以增强承载能力,而靠近尖端的部分则需要具备柔韧性以提高在非结构化环境中的适应性。
具体到结构细节,TSM由两个具有气动肌肉功能的PATB组成,这些PATB通过四个步骤制造而成:使用增材制造技术创建两个锥形波纹管,锥形波纹管底部的螺纹结构确保与密封板的牢固连接 ,形成带有内腔的柔性PATB;将预混液体硅橡胶倒入两段中并牢固地固定密封板以形成密封腔体;通过空气压缩机施加压力使硅橡胶渗透到波纹管表面的微孔中;最后,以每分钟1转的速度绕中心轴缓慢旋转锥形波纹管来固化硅橡胶涂层,在波纹管内表面形成约2毫米厚的硅橡胶涂层。
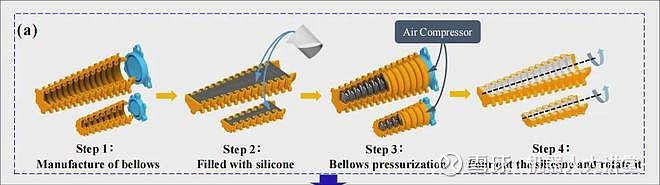
(a)PATB的制造和密封过程
在组装成完整的TSM机器人系统时,主要包括10个组件:沿主轴长度为270毫米的第一PATB和沿主轴长度为160毫米的第二PATB。第二PATB的末端连接有一个尖端连接板,该板上固定有负责驱动第二段运动的电缆索。电缆索穿行于鲍登管束之内,其一端固定在中间密封板上,穿过底部密封板后,另一端无缝对接至鲍登管驱动接头。
PATB横截面由双圆弧构成,外半径8 mm,内半径6 mm,壁厚3 mm。这些参数最初用于创建底部直径为100和60 mm的圆柱形横截面波纹管。
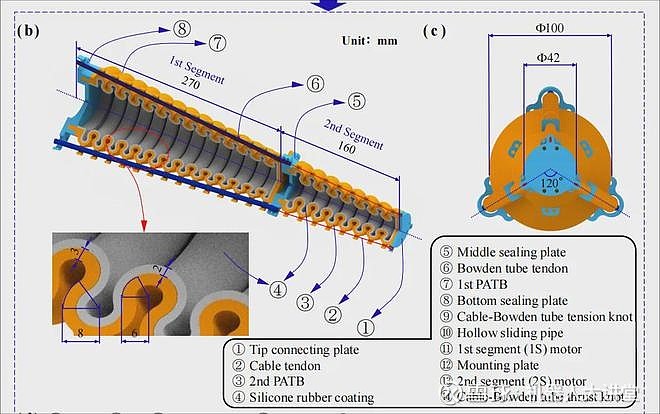
(b)完整TSM机器人的横截面图(c)沿TSM机器人主轴的视图
为了进一步优化整体结构,项目团队运用SolidWorks 3D设计软件的FLEX模块,设0.4锥度系数,实现圆柱到锥形横截面转变。下图显示TSM最终形态:底部直径100毫米过渡至顶部42毫米,达到视觉对比与功能平衡。驱动筋沿主轴120度对称分布,增强稳定性,均衡驱动力输出。
在混合驱动原理方面,研究团队设计了一种创新的电缆-气动混合驱动结构。传统软体机器人往往依赖于内部气压变化来实现形态变化,但这一方法存在诸多限制。该结构首次将鲍登管引入作为软体机器人的驱动肌腱,利用其独特的双向力特性(即推力和拉力),彻底改变了游戏规则。鲍登管不仅能够通过推力有效拉长PATB(精密传动部件),还避免了内部气压系统的复杂性和不稳定性,显著提升了系统的可靠性和响应速度。实验证明,在承载2公斤末端负载时,该混合驱动系统仍能精准控制尖端产生仅17毫米的小位移,成功解决了软体机械手承载性能弱的弊端,这背后正是鲍登管驱动的耦合力量有效提升了软体操纵器的切向刚度所致。
这种增强的刚度不仅稳固了TSM在承受自重与外加负载时的形态稳定性,更为尖端实现多段平滑延伸奠定了坚实的力学基础。更重要的是,刚度的提升直接促进了运动控制精度的跃升与响应灵敏度的显著增强,为软体机器人在复杂环境中的精准作业开辟了新路径。
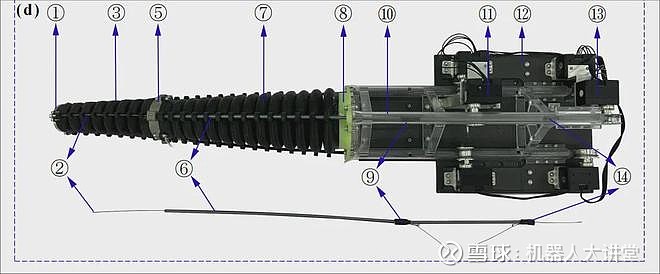
(d)实际制造的TSM机器人系统
为了进一步提升TSM的性能,研究团队还引入了BTCT(复合肌腱)技术。BTCT不仅作为扩展TSM结构的关键部件,还通过其独特的连续表面接触和同心管布置设计,有效减少了肌腱传动过程中的摩擦,降低了2S(第二段)变形对1S(基础段)的影响。这种优化布局不仅提高了传动精度,还使得整个系统的能量利用效率大幅提升。
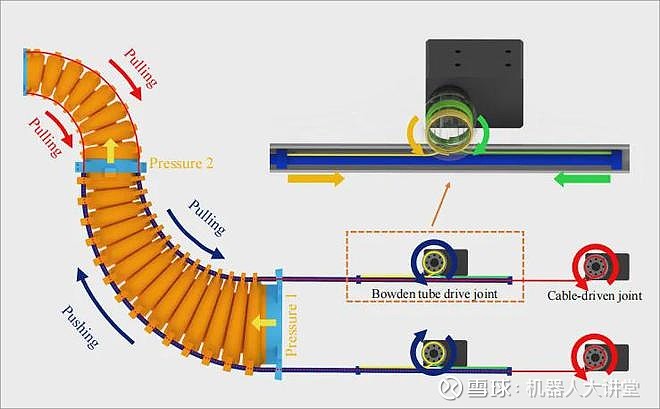
TSM的混合驱动原理图
上图直观展示了TSM的混合驱动原理。该系统通过两个压力比例阀精确控制PATB的内部压力,实现轴向伸长。同时,集成复合材料肌腱BTCT则用于抑制PATB内部压力产生的推力波动,进一步增强刚度。鲍登管驱动接头和电缆驱动接头的巧妙组合,实现了对TSM变形的精准控制。电机通过反转控制鲍登管产生双向运动,结合电缆的对称固定和反向缠绕设计,确保了驱动力的稳定传递和TSM形态的灵活变化。
为了全面且精确地评估TSM(软体操作模块)的可变刚度特性,研究团队设计了针对轴向、切向及扭转三个维度的刚度测试方案。在测试中,考虑到PATB(精密传动部件)的两种内部压力状态,分别在无驱动与驱动条件下进行了对比分析。
轴向刚度测试:在驱动状态下,TSM在10mm处的承受力跃升至无驱动时100mm处受力的近两倍,刚度从0.57 N/mm至10.77 N/mm区间广泛变化,其变化能力高达1889%,充分展示了混合驱动在轴向刚度上的显著提升。
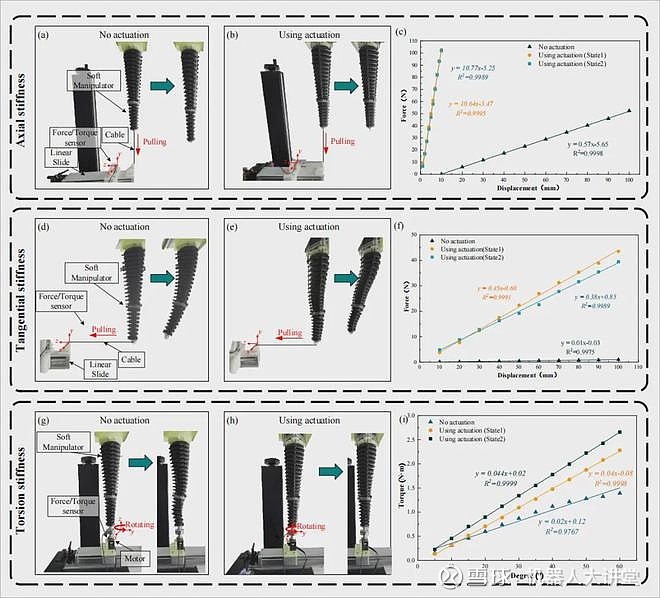
混合驱动刚度的表征
切向刚度测试:通过实施100mm的切向拉伸测试,TSM的切向刚度在0.01 N/mm至0.45 N/mm之间灵活变化,其变化能力达到了4500%,进一步验证了混合驱动设计在切向刚度调节上的卓越性能。
扭转刚度测试:在60°的扭转角度下,TSM的扭转刚度在0.02 Nm/deg至0.044 Nm/deg之间稳定变化,实现了220%的刚度变化能力。尤为值得一提的是,PATB的高弹性模量(与生物软骨相媲美)在增强扭转刚度方面发挥了关键作用,显著提升了TSM抵御外部干扰的能力,确保了其在复杂环境中的稳定性。
这一系列实验数据有力证明了混合驱动方法通过复合肌腱BTCT与PATB的紧密协作,不仅极大地增强了TSM的刚度特性,还显著提升了其负载承载能力,并有效降低了精确控制的技术门槛,为软体机器人领域的高精度运动控制提供了坚实的理论与实践基础。
▍TSM的逆运动学建模
在传统的刚性机器人运动学中,逆运动学通常可以通过解析方法求解,即直接根据目标位置和姿态计算出所需的关节角度。然而,对于软体机械臂来说,由于其高度的可变形性,这种直接的解析方法不再适用。软体机械臂的复杂、非线性行为使得基于力、材料属性和几何形状等因素预测其变形变得困难,因此无法直接获得逆运动学的解析。
为了解决这些挑战,研究团队采用了一种基于深度学习的神经网络(NN)方法作为逆运动学模型的近似器,来提高软体机械臂逆运动学建模的准确性和性能。
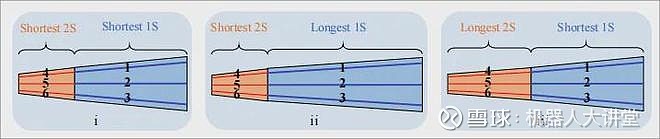
用于校准和解耦执行器变量的三种预定义标准配置
具体来说,该方法使用一个训练有素的神经网络来学习从输入(如施加的力量和期望的位置/姿态)到输出(关节角度)之间的映射关系。通过这种方式,神经网络能够捕捉并建模软体机械臂的非线性动力学行为,从而提供更为精确的逆运动学解决方案。
为了提高逆运动学解的精度,研究团队引入了局部连续性的概念,即在任务空间的局部区域内,末端执行器位置的微小变化应导致执行器参数成比例变化。通过定理转换,将非线性映射问题简化为局部线性问题,从而提高了逆运动学解的稳定性。
此外,针对Boden Tube Cable Transmission (BTCT)肌腱的耦合关系,研究团队团队创新性地采用了三个标准化的预配置策略,对执行器变量实施了解耦预处理,确保了运动控制的精准无误,为软体机械臂的精细操作奠定了坚实基础。
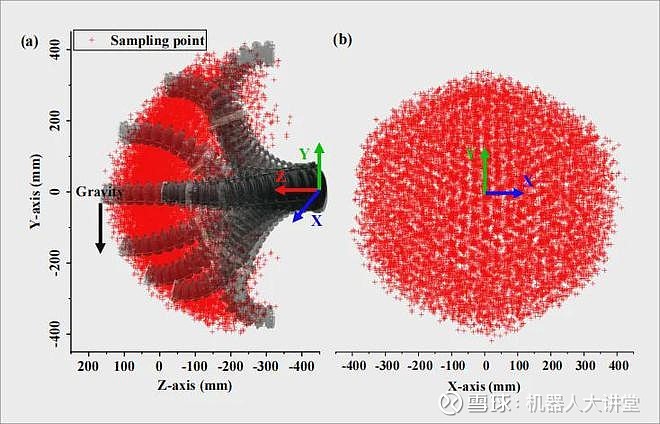
TSM尖端上的任务空间采样数据集
在神经网络训练与配置环节,研究团队通过Intel RealSense T265摄像头精准追踪TSM尖端的位置与方向,并同步采集电机编码值,构建了一个包含15,625个样本的丰富数据集,并科学划分为训练集与验证集。
所设计的NN模型,以六层架构精心搭建,内含四个深层隐藏层,每层精心配置了适量的神经元(依次为512、512、256、256),并辅以输入输出层各六神经元,采用Sigmoid激活函数激活神经元活力,Adam优化器则以其高效性引领学习率优化之旅,确保学习步伐稳健前行。训练过程中,团队灵活运用提前停止策略,有效遏制了过拟合现象,当验证集上的均方误差(MSE)连续150步降幅小于1%时,果断终止训练,确保了模型的泛化能力。
训练成果显示,训练集与验证集的R平方值分别为0.8774与0.8597, 这使得NN模型可以作为软机械手尖端初始定位的通用解决方案。为了进一步实现软机械手的精密运动控制,研究人员在NN模型基础上提出了闭环迭代反馈控制器的融合定位算法。
▍闭环迭代反馈控制器(IFC)设计
为了减少软机械手尖端实际状态与期望状态之间的误差,实现软机械臂的高性能定位控制和动态轨迹跟踪,研究团队精心设计了一种闭环迭代反馈控制器(IFC)。
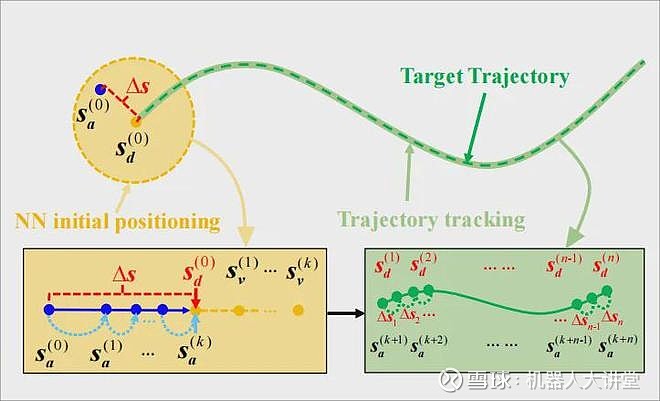
迭代反馈控制器(IFC)控制器的逻辑示意图
IFC系统根据控制参数和任务需求,将控制器分解为三种算法,协同工作以实现高效控制:
1、恒增益迭代反馈控制器(CG-IFC)
生成虚拟期望状态,并根据实际状态与几何期望状态的偏差进行迭代校正,逐步逼近真实期望状态。通过神经网络逆运动学模型,将虚拟期望状态转换为执行器控制输入,实现精确定位。
2、变增益迭代反馈控制器(VG-IFC)
针对动态轨迹跟踪的挑战,在CG-IFC基础上增加滑动窗口积分项,以补偿系统误差积累,提高动态跟踪精度。尽管有效,但积分项可能引入速度方向偏差和噪声干扰。
3、滤波器优化的迭代反馈控制器
为进一步优化VG-IFC在动态轨迹跟踪中的表现,引入滤波算法,在多个迭代间隔内平均误差,以减少噪声影响,稳定软机械手尖端速度,确保精确沿期望轨迹移动。通过调整平滑间隔,平衡控制精度与稳定性。
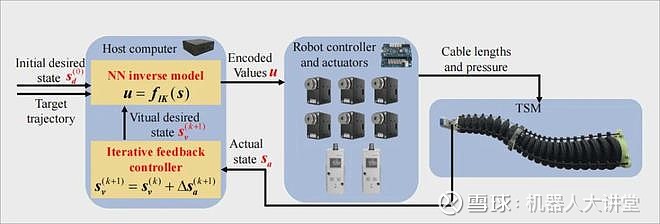
TSM的系统架构
通过CG-IFC、VG-IFC及滤波器优化的协同作用,优化迭代反馈控制器有效提升了软机械手在高精度定位控制和动态轨迹跟踪方面的性能,为复杂环境下的精密操作提供了了坚实可靠的技术支撑。
▍性能实验与测试
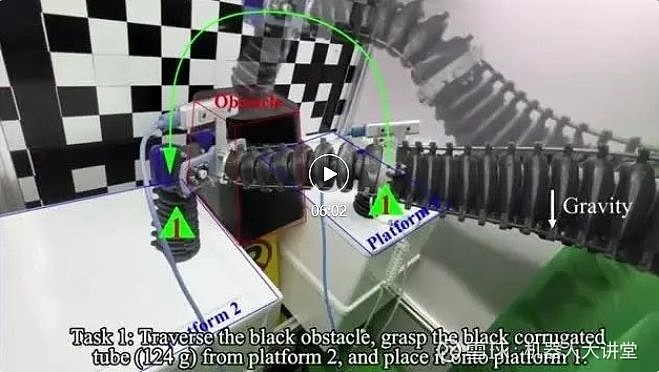
通过将所提出的控制方法应用到TSM上,并进行多种实验,研究人员就其性能进行了验证。实验设计围绕字母“HIT”的3D静态点定位、圆形轨迹动态跟踪、水平和垂直轨迹动态跟踪等核心任务展开,并辅以方向控制和扰动实验,全面评估了控制系统的精确性和鲁棒性。
实验架构精简高效,上下位机协同作业:上位机(NUC8i7BEH6)基于NN逆运动学计算控制指令,通过串行通信传至下位机(OpenCM.04),后者利用RS485接口精准操控电机与驱动器,实现TSM变形。TSM尖端配备高频定位传感器(Realsense T265),确保闭环控制实时反馈,求解迅速(仅5毫秒)。
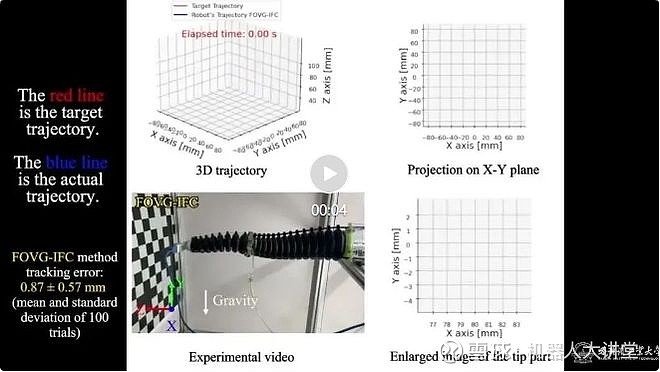
FOVG-IFC方法的圆轨迹动态跟踪
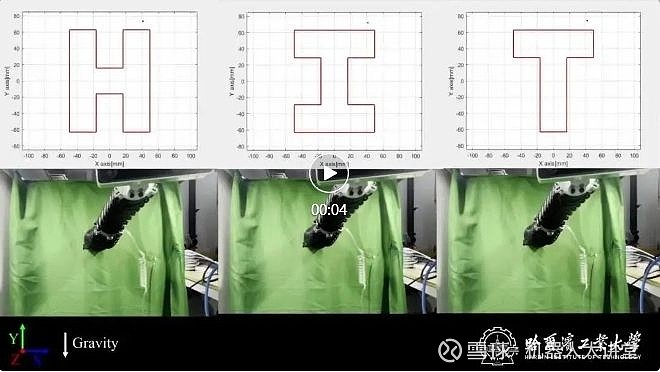
HIT 轮廓轨迹定位←

恒定空间点的姿态跟踪控制
实验结果显示:TSM展现出超高精度的3D点定位能力,误差范围缩至亚毫米级;在动态轨迹跟踪中,NN与FOVG-IFC算法的强强联合显著削减了误差,提升了跟踪稳定性;面对复杂多变的“HIT”轨迹,TSM亦能游刃有余,展现出非凡的运动控制能力;方向控制精确无误,误差控制于极低水平;扰动实验中,TSM展现了出色的自我恢复能力,迅速回归稳定状态;遥操作抓取实验验证了人机交互的直观性与便捷性;而在杂乱环境下的无碰撞操作及在压力干扰存在下的自适应清洁任务中,TSM更是彰显了其在人机协作领域的巨大潜力。

杂乱环境下的避障精密抓取←

人手压力干扰时的写字板擦拭测试
以上结果表明,研究团队提出的这一控制方法不仅大幅增强了TSM的运动精度与鲁棒性,更为其在多样化复杂场景中的广泛应用奠定了坚实基础。展望未来,随着技术的持续精进与迭代优化,TSM有望在人类协作与辅助机器人领域扮演更加关键的角色。
参考文章: