生物有机体,凭借其复杂而高度集成的结构,展现出了显著的多功能性。以章鱼为例,它能够同时进行形态的变化和刚度的调整。这种独特的特性启发了软体机器人领域的诞生和发展。该领域通过模仿生物特性,实现了机器人的高度灵活性和对环境的适应性。
然而,在当前软体机器人设计中,通常需要集成多个独立模块来实现形状改变和刚度调节等功能。这种设计不仅使得结构笨重、制造扩展性差,而且控制系统复杂,常需多个控制回路以完成任务。相较于生物系统的高度多功能集成,软体机器人的这一局限尤为明显。尽管这样的独立模块化确实提升了系统的灵活性,使其能分别控制刚度与形状,但在医疗设备和可展开结构等应用场景下,这些功能往往需要同步实现。因此,开发一种集成式机器人结构,利用单一控制回路同时实现程序化驱动和刚度变化,已成为一个迫切的需求。
▍提出SAILS,实现形状与刚度可变
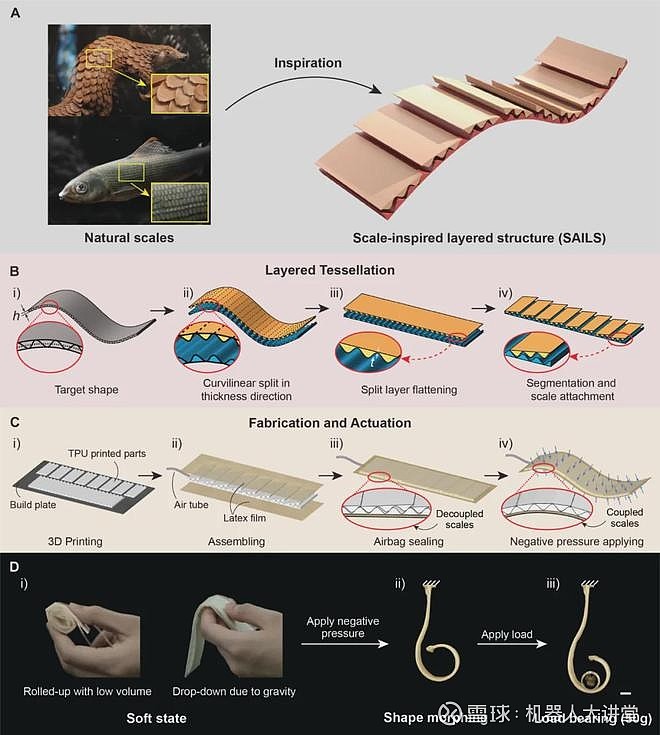
近日,来自新加坡南洋理工大学王一凡教授团队的研究人员,受穿山甲和鱼等生物体的可变刚度特性和自然鳞片结构的独特机械性能及多功能性启发,开发出了一种名为“鳞片启发的层状结构”(Scale-Inspired Layered Structure,简称SAILS)。
SAILS介绍
SAILS结构巧妙地融合了形状变形与可变刚度两大功能,显著提高了机器人的适应性和多功能性。
SAILS结构由多个鳞片以及一个基层组成,均具有可编程的表面图案。在未封装状态下,SAILS 保持柔软和灵活。而当SAILS被封装在弹性密封袋内并施加负压时,鳞片和基层上的图案受压缩并紧密耦合,使整个结构变形为预设形状,同时显著提升刚度。
由于采用负压驱动,其压力变化低于1个大气压,故能实现较高驱动频率,且体积不变。这种设计允许SAILS在软态和硬态之间实现高达53倍的表观弯曲模量变化,可在高达5赫兹的频率下驱动。同时,使得机器人结构保持约1毫米厚度,并有进一步缩小的潜力。
SAILS的生物启发、设计、制造和实验验证
通过开发一种两栖软机器人和能够适应不同负载的无人机自适应、可调着陆系统,研究团队进一步展示了 SAILS 的多功能性。
该研究成果相关论文已以 “Scale-Inspired Programmable Robotic Structures with Concurrent Shape Morphing and Stiffness Variation” 为题发表在《Science Robotics》期刊上。文章第一作者为博士生陈天雨。共同作者包括博士生杨旭东、张博建以及博士后研究员李君威、潘杰为论文的共同作者。通讯作者为王一凡教授。
接下来,一起来和机器人大讲堂深入探索这一研究成果!
▍SAILS设计和制造
SAILS的设计和制造流程汲取了自然界的智慧,通过一种独特的分层镶嵌技术,精准地构建了鳞片和基层上的微观图案。以一个具有波浪形轮廓和特定厚度h的目标形状为例,研究团队详细展示了SAILS的制作过程。
首先,确定了目标形状的中间表面,并在上面绘制了一个振幅为h/2、具有特定周期数的正弦曲线。沿着这一曲线将板材切割成两部分,并分别上色以便于区分。
然后将分离层的上下表面划分为四边形单元,通过调整每个单元之间的角度使之展平,同时保持其几何形状不变,以便上下边界均呈平面状。为了增强最终结构的机械强度,每层的背面都添加了厚度为t的薄型支撑片。

SAILS的制造和装配
接下来,将上层分割成多个鳞片,确保这些鳞片上的图案与基层的对应周期紧密匹配,以避免错位。最后,将这些鳞片附着到基层上,形成了完整的SAILS结构。
在制造阶段,研究团队采用了熔融沉积成型(FDM)三维打印技术,使用热塑性聚氨酯(TPU)线材来打造鳞片和基层,并覆盖了一层聚四氟乙烯(PTFE)胶带以减少摩擦。通过电烙铁选择性加热鳞片的一侧,将其精准地粘附至基层。随后,将SAILS封装在两片乳胶膜之间,用硅胶密封形成气密外壳,并连接软管以便操控内部压力。
值得一提的是,研究团队还开发了有限元(FE)模型来模拟SAILS的力学行为。这个模型能够准确地再现实验中观察到的三点弯曲和形状变形结果,为SAILS的设计和优化提供了有力的工具。通过与实验数据的对比验证,FE模型展现了极高的预测准确性,进一步证实了其作为设计工具的可靠性。
▍SAILS性能试验与测试
在实验验证环节,研究团队精心设计了一系列实验来全面展示SAILS的变形能力和刚度特性。
SAILS的形状变形
为了展示 SAILS 的形状变形能力,研究团队创造了具有零高斯曲率的一维表面和具有非零高斯曲率的二维表面,并选取了几种具有可展曲面特性的典型结构进行了实验和模拟。这些结构具有零高斯曲率,包括钩形、波浪形和螺旋形表面。
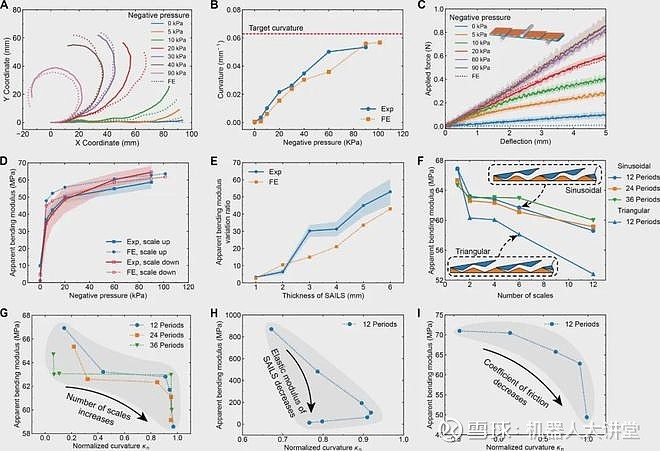
通过应用90 kPa的负压,研究团队发现目标形状、有限元 (FE) 模拟与实验结果之间存在极高的一致性,其均方根误差 (RMSE) 仅为 ~5%。此外,研究人员还探索了具有非零高斯曲率的不可展曲面结构。为实现这些复杂结构的变形,他们采用了网格状设计。
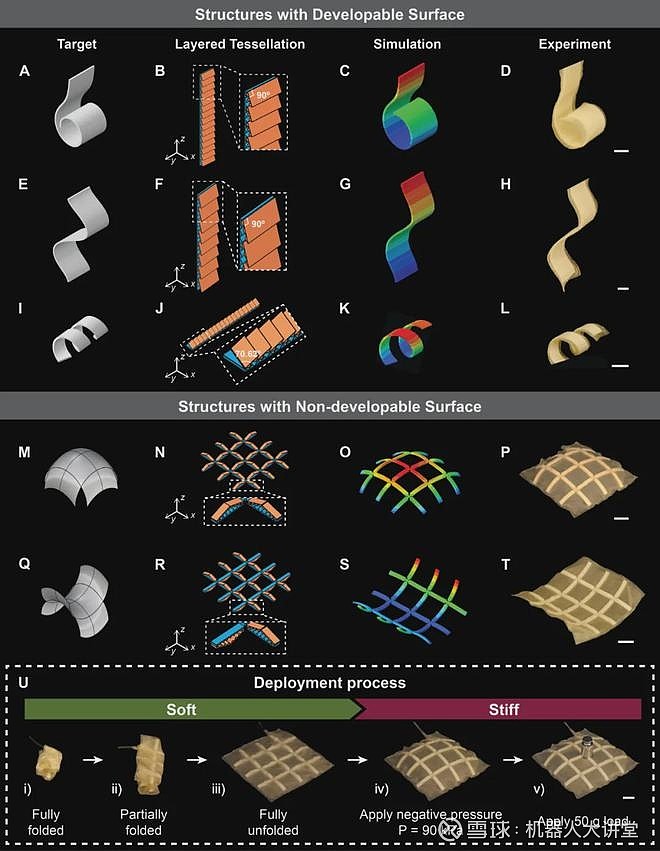
通过SAILS实现可展及不可展曲面的变形
为了定量评估 SAILS 的形状变形能力,研究团队还设计了一个目标形状为半径15.92 mm的圆形的SAILS样本。在0至90 kPa负压下,SAILS展现出了逐渐接近目标曲率的变形能力。在90 kPa负压时,SAILS的曲率达到了0.0534 mm−1,与目标曲率非常接近。
此外,90 kPa负压下 SAILS 和气囊的应力和应变分布显示,鳞片和基层的最薄区域是应力和应变集中的主要区域。气囊中的最大真应变为1.32,远低于乳胶膜的拉伸极限,这进一步证明了设计的合理性和材料的适用性。
SAILS的刚度变化
为了评估SAILS的刚度,研究团队采用了三点弯曲实验。这种实验可以准确测量材料在受到外力时的抗弯曲能力,为SAILS的刚度提供定量评估。
用于测试的SAILS样品尺寸为长10 cm、宽3 cm、厚2 mm,包含四个鳞片,每个鳞片上有三个正弦周期。通过对两个样品每个进行三次测试,研究团队获得了平均力-挠度曲线。结果表明,结构的刚度随负压的增加而单调增加。当负压超过60 kPa时,结构在挠度范围内表现出线性弹性。负压低于60kPa时,曲线的屈服行为由鳞片和基层间的分离和滑动引起。有限元(FE)模拟结果与实验结果一致。
SAILS的变形与变刚度性能表征
研究人员计算了SAILS在不同负压下的表观弯曲模量,结果显示,在鳞片朝上的情况下,随着负压从 0 增加到 5 kPa,表观弯曲模量从 9.8 MPa 迅速增加到 36.8 MPa。当负压超过 20 kPa 时,表观弯曲模量的增加变得不明显,最终在 90 kPa 压力下达到 58.7 MPa。这意味着SAILS具有约 6 倍的高刚度变化率。在鳞片朝上和朝下条件下的刚度相似,则表明 SAILS 能承受来自两个方向的负载并保持良好的承载能力。FE 模拟结果与实验结果非常吻合。
研究团队还探讨了SAILS的厚度对其刚度变化率的影响。随着SAILS厚度的增加,表观弯曲模量变化率显著增加,在SAILS厚度为 6 毫米时,最大比率为 53,超过许多现有的可变刚度系统。
随着鳞片数量的增加,表观弯曲模量在所有情况下都降低。这是因为鳞片数量的增加会增加结构中的切口数量,损害SAILS的刚度。正弦形表面图案的表观弯曲模量高于三角形表面图案,而周期数的影响可忽略不计。
在工程变形材料中,形状变化能力和承载能力通常相互排斥。下图展示了这种权衡,其中每个数据点对应于SAILS的一种特定设计。结果表明,随着鳞片数量的增加,表观弯曲模量降低,而表征变形曲率的归一化参数Kn在所有情况下均增加,表明两种特性之间的权衡。类似权衡也出现在SAILS长度改为15 cm或改变材料属性时。
▍SAILS结构应用与验证
两栖软体机器人
为了全面展示SAILS的功能与适应性,研究团队将其应用于软式两栖机器人的设计中。
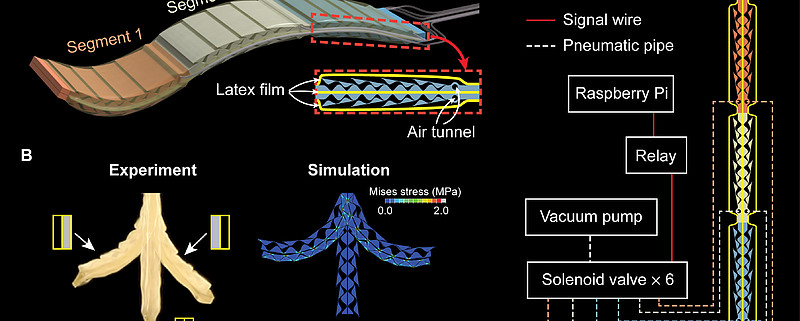
该机器人灵感来源于鳗鱼和蛇的移动方式,采用行波运动,使其能在地面和水中自由导航,真正实现了两栖能力。它由三个部分组成,每个部分包含两个相对的腔室,每个腔室内置SAILS,并设计为可变形为半圆形的目标形状。
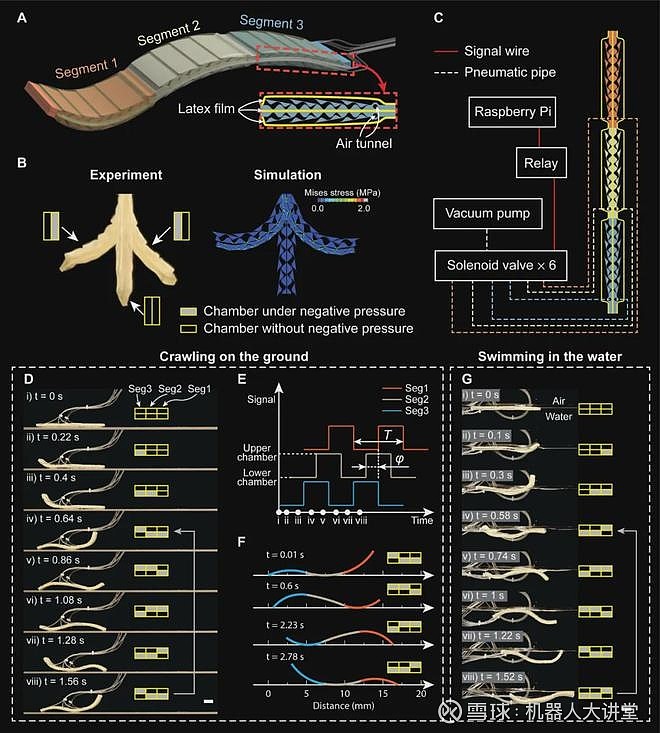
基于SAILS的软体两栖机器人:设计、控制与性能表征
由于SAILS的柔软性,当一个腔室启动时,它会变形为目标形状,而未启动的腔室则几乎不受任何约束。因此,通过对不同腔室施加负压,机器人可以向两个方向弯曲。这种设计使机器人能够在地面上爬行,也能在水中游泳。
研究团队开发了先进的控制系统来操作这款软体两栖机器人。通过依次启动每个节段中的两个腔室,可实现机器人在地面上的爬行。同时,研究团队还开发了一个动力学模型来预测机器人在地面上的运动,建模结果与实验结果高度吻合。
机器人翻越障碍以及从陆地入水
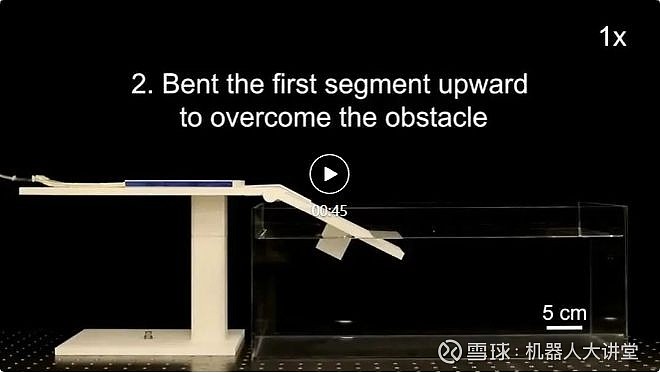
在水中游泳时,机器人的运动机制有所不同。研究团队通过调整驱动顺序和控制信号,实现了机器人在水中的高效游泳。这款机器人展现了出色的运动能力、多功能性和适应性。它能克服障碍物、从陆地过渡到水中,并能在受限空间中灵活导航。此外,机器人还具有承载能力,能承载相当于其自身重量两倍的负载,并能爬上22°的斜坡。
研究团队进一步研究了驱动频率对机器人速度的影响,并发现了一个最佳驱动频率。使用自主开发的动力学模型,研究团队准确预测了机器人在不同频率下的速度。这些研究充分展示了SAILS在软式两栖机器人中的巨大应用潜力。
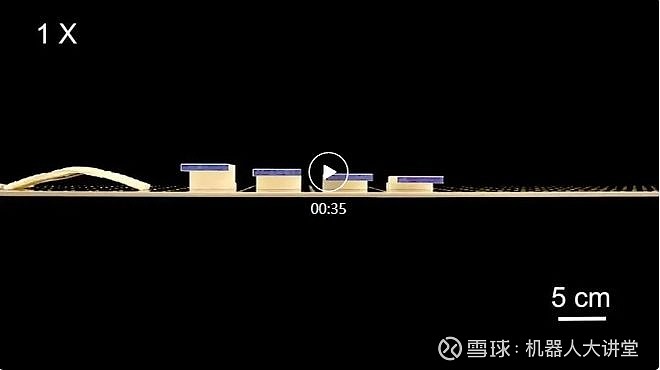
软体机器人通过一系列不同高度的狭窄空间
为了展示SAILS可变刚度特性的独特能力,研究团队设计了一个更大的机器人,并展示了其越过障碍物、变成桥梁允许玩具车通过以及保护鹌鹑蛋免受落球伤害等功能。这款大型机器人还展现了增强的负载能力,能承载相当于其自身重量七倍的负载。这些实验结果充分证明了SAILS在软式两栖机器人中的卓越性能和广泛应用前景。
无人机可变刚度着陆系统
利用SAILS技术,研究团队为无人机设计了一种独特的钩形起落架。这种设计不仅具有创新性,而且实用,能够适应各种飞行条件和着陆环境。
为了实现无人机上的独立自适应系统,研究团队精心集成了真空泵、电磁阀、压力表以及Raspberry Pi等组件,以精确控制起落架的展开过程。这些组件的选择和配置都经过仔细考虑,确保系统的可靠性和稳定性。
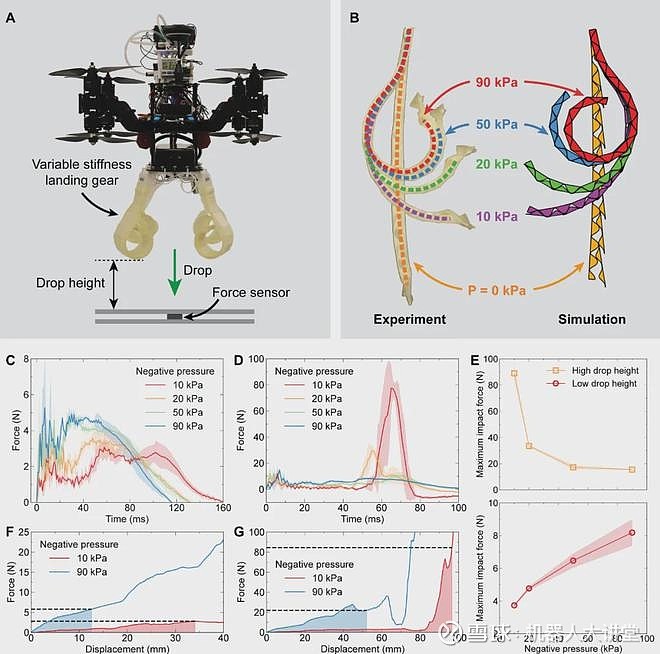
基于SAILS的变刚度无人机着陆装置
为了科学评估这种自适应起落架的抗冲击性能,研究团队实施了一系列严谨的跌落测试。无人机分别从3厘米和20厘米两个不同高度释放,以模拟不同的飞行场景和紧急情况。测试结果揭示了一个有趣的现象:在较低跌落高度下,最大冲击力随负压增大而上升;而在较高跌落高度下,则呈现相反趋势,即最大冲击力随负压增大而减小。这一发现与先前对其他可调刚度结构的观察结果相一致。
为了深入解析这一现象,研究团队利用有限元(FE)模拟进行了对比分析。他们分别观察了起落架在10 kPa和90 kPa两种不同负压下的压缩情况。通过分析,研究团队发现力-位移曲线提供了比较能量吸收能力的直观依据。他们指出,在10 kPa负压下,由于起落架的刚度较低,峰值力也相应较低。相反,在90 kPa负压下,起落架未发生折断,因此峰值力保持较低水平。此外,研究团队还发现,在更高能量的冲击下,即无人机从更高高度跌落时,负压较低的起落架所受力显著增加。这是因为固定端接触地面所致。而图7F中的阴影区域所代表的能量吸收量低于图7G,这恰好对应了无人机从较低高度跌落的场景。
无人机着陆装置在空中的部署过程
借助机载控制系统,研究团队可以灵活设定施加于起落架上的负压。他们展示了无人机起落架的展开过程,并证实了其稳定性。此外,起落架还兼具夹持功能,能够轻松提起225克的负载,并携带负载顺利起飞。这一系列演示充分展现了SAILS作为无人机起落架的卓越多功能性。
参考文章: