
参会请扫描图中二维码
希迪智驾(CIDI)简介
希迪智驾(简称“CiDi”,长沙智能驾驶研究院)成立于2017年10月,由香港科技大学著名创业导师李泽湘教授领衔创办,以智能驾驶科技创新及应用为导向,致力于打造能落地的智能驾驶商用车及关联技术产品。CIDI拥有专业的智能汽车研发中心和国内场景最复杂的智能驾驶测试区运营资格,是一家获得国家颁发的智能网联汽车开放道路测试牌照的企业。
两年来,希迪智驾车路协同产品销售合同已达3500万元,2018年实现基于5G的车路云协同V2X应用。2019年相继发布"V2X+交叉路口"、“V2X+智慧高速”、“V2X+矿卡”、“V2X+公交”等系列解决方案,打造车路协同式道路交通,按照车路协同的技术路径积极推动自动驾驶的发展。
希迪智驾(CIDI)提供的产品解决方案
希迪智驾的智能网联驾驶解决方案主要是面向智能网联汽车,分为网联辅助驾驶与网联自动驾驶,由OBU、RSU以及智能网联应用场景软件组成。
智能网联应用场景软件由V2V应用程序、V2I应用程序、V2P应用程序以及HMI APP构成。
OBU通过射频模块(LTE-V/DSRC)进行数据的收发,接收到周边车辆OBU或路侧交通设施RSU发来的车辆状态与路况数据,进行解析、数据整合、场景预警决策算法,最终实现前向碰撞预警、盲区预警、变道辅助、闯红灯预警等主动安全与交通效率场景,帮助驾驶员规避危险、提升驾驶效率,也可将数据上行传输以供自动驾驶实现进一步的数据融合决策与协同控制。
V2N是车与云之间的内容,可以给汽车厂、修理厂、4S店、保险公司等提供实时信息的交互,相应带来的一些商业模式。

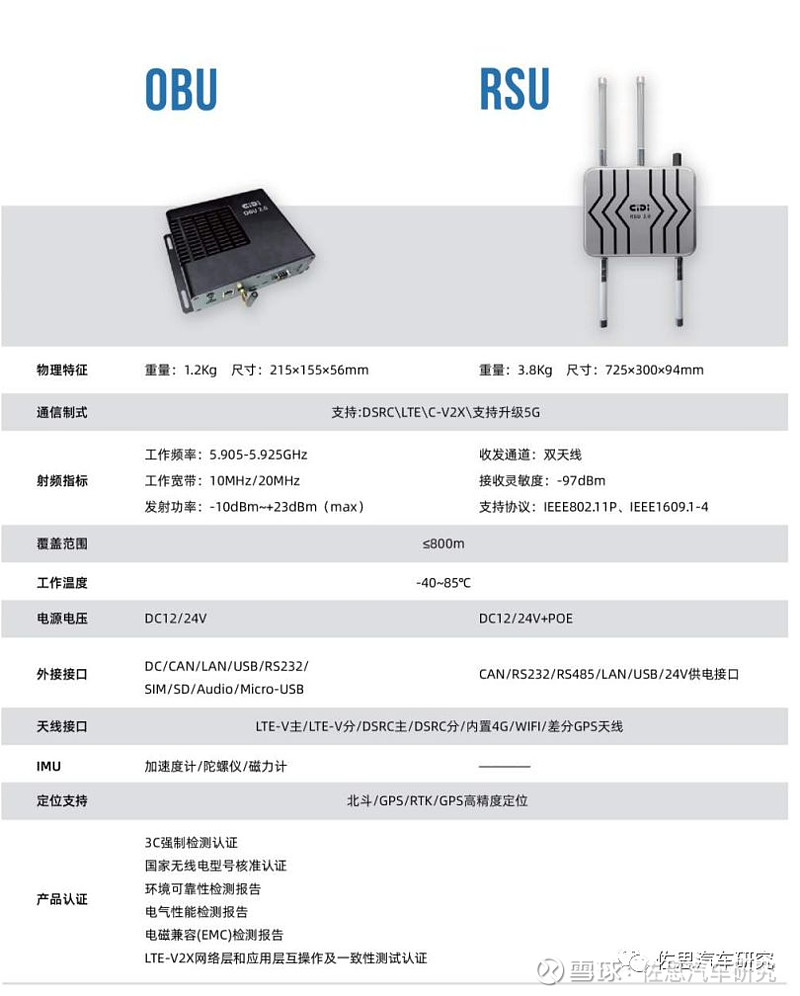
CIDI OBU 2.0 (智能网联车载单元)
内置WIFI、LTE、DSRC(IEEE802.11p)、C-V2X(LTE-V)模块,支持LTE/LTE-V/DSRC三种工作模式;
支持USB/RJ45 接口摄像头,一路720p V2V高清视频传输,两路480p V2N实时视频传输;
支持GPS/北斗、内置RTK GPS模块,可提供高精度定位信息;
支持车辆数据与视频(V2N),可实时将车辆获取到的信息发送至云平台监控与管理,支持车车协同(V2V),通过研判算法保障主动安全、通过交互通信消除个体盲区、通过信息共享实现驾驶视野增强,支持车路协同(V2I),可读取交通灯数据、交通标识等静态与动态交通路况信息,支持行人碰撞危险预警(V2P)。
CIDI RSU 2.0 (智能网联路侧单元)
内置WIFI、LTE、DSRC(IEEE802.11p)、C-V2X(LTE-V)模块,支持LTE/LTE-V/DSRC三种工作模式;
支持GPS/北斗、内置RTK GPS模块,支持高精度RTK定位增强信息发布,作为RTK定位基站,提供基于V2I的高精度差分定位信息;
支持路云协同(V2N),可将实时路况信息发送至云端管理,也可通过云端获取天气、地图、动态交通等信息;可作为路端智能感知基站,外接交通信号控制机、交通流量视频分析机,通过车路协同(V2I)拓展车辆路况感知范围。
2018年12月28日,全国首条开放道路智慧公交示范线在长沙试运行。其中,希迪智驾智能公交亮相,实现了车辆自动启停、红绿灯路口转弯、停靠等一系列动作。希迪智驾智能公交上路行驶,不仅做到了单车智能,更是实现了人、车、路的一体化运行监测,实现车路云协同。
2019年1月,希迪智驾发布了“V2X+交叉路口”解决方案--智能网联交叉路口管理系统(CISS-cooperative intersection surveillance system),该系统集成组合传感器感知技术、传感器融合算法、V2X技术、交通优化算法,可实现交叉路口行人、非机动车辆、红绿灯与智能网联汽车之间的信息传递。
2019年3月,希迪智驾发布了“V2X+智慧高速”解决方案,“V2X+智慧高速”解决方案只是希迪智驾针对智慧高速建设三步战略中的第一步——车路协同式智慧高速,其余分别为半自动化式智慧高速以及全自动化式超级高速。
2019年5月,希迪智驾推出自动驾驶矿卡和远程智能驾驶矿卡解决方案,同时针对矿区特点研发的智慧矿山无人驾驶矿卡在内蒙某矿场正式投入使用,并且提供虚拟驾驶舱远程遥控驾驶、四路视频回传、驾驶模式切换、紧急情况介入、车辆状态远程监控等功能。
2019年11月,希迪智驾发布"V2X+公交智慧出行"解决方案,通过对公交车辆及交通信号灯进行网联化升级改造,运用基于C-V2X的车路协同技术,使得公交车辆拥有与红绿灯通信的能力,结合希迪智驾V2X产品与算法,帮助公交车辆以最短时间完成首末站行程,从而提高通行效率。

为了体现车路云一体化的车联网概念,希迪智驾将车端和路侧的数据通过固定的通信协议和数据交互方式与云端进行上下行数据传输。指挥调度中心通过云端系统,对智能驾驶车辆进行实时视频监控。同时,通过云端系统的云计算和云存储,将当前时刻所有网联车辆的情况(如触发主动安全告警的地点和时间、车载设备动态流量统计等)和路侧状态(如路侧单元实时监控、红绿灯相位状态监控、危险路段统计等)进行全面展示。

希迪智驾(CIDI)访谈摘要
5G-V2X作为车联网发展的关键技术,能增加感知范围、降低感知成本、缓解交通拥堵以及丰富应用,是目前产业的发展热点。
作为V2X和车路协同行业内的领先企业,佐思汽车专门对希迪智驾(CIDI)进行了访谈,部分访谈内容摘要如下:
Q:目前V2X的主要落地场景中,(1)高速道路/干线物流场景;(2)城市道路/公交运营场景;(3)封闭道路/工业园区场景;(4)城市特定区域/Robotaxi无人出租车场景。希迪智驾认为以上场景的实施难点是什么,解决方案是什么?
A:
这几个场景都属于交通基础设施改造范畴,改造内容主要为:交通基础设施数字化、网络化、智能化。这也是未来智能交通的发展趋势,主要解决交通安全以及交通拥堵问题。各场景中根据道路情况不同,有所区别也有重合之处。
比如高速道路,通过道路V2X改造解决超视距问题,视距不足是高速道路发生事故的根本原因之一。通过V2X能让车在有人或无人驾驶状态下都能看的更远。
对于城市道路场景,需要解决比如说公共车辆优先的问题,包括公交车、消防车、救护车等。
对于特定区域ROBOTAXI场景,需要解决自动驾驶中单车智能解决不来的问题,比如说自动驾驶车辆通过交叉路口,交叉路口人多车多路况极其复杂,只靠车辆传感器难做出精确判断,因此只能通过路侧网联化智能化设备协助ROBOTAXI,协同交叉路口的车辆、行人按秩序通过。
目前项目都是由业主方来运营和维护,但未来的真正运营方是谁的可能性非常多,比如(1)由社会资本直接参与建设运营;(2)国有资本,主要是路权的业主方(各地交通委、高速公路管理公司、园区管理公司等)建设完成后交由第三方运营,挖掘数据价值实现变现;(3)国家成立全国性或区域性的V2X运营公司来统一运营,全国实现一张网利于互联互通,降低不必要的重复投入,比如说目前的铁塔模式。总的来说,建设、运营管理的模式仍然处于探索阶段。
Q:未来3年如何实现“聪明的车+智慧的路”相结合,需要解决什么问题,CADS协同式自动驾驶的发展前景如何?
A:
未来3年主要需要解决问题是V2X路侧基础建设进度问题,聪明的车很容易提供,但智慧的路需要大量人力物力财力投入需要一个时间过程。也就是说智慧的路建设进度影响CADS发展的主要因素之一。智慧道路建设可以提供一个思路,以某一段道路为例,可以第一阶段进行关键节点的数字化网联化智能化改造,第二阶段,全路段的数字化网联化改造,第三阶段,全路段的智能化改造,全路段智能化改造的成本是最高的。
由于道路数字化、网络化、智能化改造的前期是道路必须通电通网,资金量需求很大,因此CIDI建议的方式是可以分为三阶段来完成改造,(1)关键节点,对容易发生交易事故的区域或交通拥堵区域进行改造;(2)完成全路段的数字化、网络化改造;(3)完成全路段的智能化改造,智能化改造费用最高、难度最大,智能化改造的目的是道路侧可以全息感知路况,需要布置V2X路侧RSU、路侧传感器等。
协同式自动驾驶(connected autonomous driving system)无论是学术界还是产业界都是近期非常热门的技术,主要方向为1.车辆编队(vehicle platooning) 2.协同式车辆变道辅助(cooperative lane change)3. 协同式交叉路口管理(cooperative intersection management)4.车辆能源管理(vehicle energy management)5.道路路况估计(road condition estimation)
Q:贵公司的提供怎样的产品,如何实现产品增值?
A:
希迪智驾能提供一整套完整解决方案,客户非常喜欢这类型供应商。希迪智驾也是国内为数不多的,能提供车端(OBU)+路端(传感器、RSU)+云端(边缘计算MEC、云平台管理软件、APP)全套产品的企业。
希迪智驾定位是V2X设备供应商,v2x方案供应商,不会直接参与智慧交通集成。技术难点主要在与如何做好V2X应用也就是V2X设备里面的算法和软件,以及大量应用场景的算法实测经验,如何使智能驾驶更安全,如何使交通更顺畅需要花大量人力物力财力研发测试。类似于自动驾驶领域,硬件技术大家区别不会太大,最终自动驾驶真正的核心的就是算法测试,需要大量的实车测试里程,比如说waymo这种测试里程非常长。
例如在V2V上,目前车与车通信传递的是车的自身运行参数,通过这些参数如何通过算法软件来解决主动安全问题,如果车更高级点具备了L1,L2级自动驾驶功能,车与车传递的是车传感器感知的数据,那么如何通过算法软件来解决主动安全,这需要复杂的研发设计与调试。
还有V2I,如何通过V2I来解决交通出行,解决交通拥堵,这都要在RSU里面内置复杂的算法软件来完成。从外表看硬件都一样,但设备安装在车上安装在路侧端,能有啥功能体现出来就是各家比本事了,这也是V2X产品增值的地方。
V2X应用要做好是集无线通信、ADAS、交通控制都具备完整知识架构的团队才能做好的。此外,V2X类似自动驾驶技术一样,也需要大量的里程实际道路测试才能不断完善,总而言之,V2X产品从设计、实现、测试都有不少技术壁垒。
此外,V2X中,X对应的对象越多,算法的复杂程度也越高,比如车内信息、车路信息、车车信息等都是X的可能来源,因此各个厂商RSU、OBU的能支持的X场景算法越多,自然价值就越高。对于希迪智驾而言,希迪智驾已经能做到80个X场景的算法支持,在国内外是处于领先地位的。
Q:路侧边缘节点MEC谁来铺设和运营,或向谁采购?高精度定位和地图在V2X中起到的作用,V2X如何构建局部动态地图LDM(Local Dynamic Map)?
A:
具体看项目本身,如果项目有移动运营商参与,则一般是移动运营商铺设MEC,如果没有运营商参与,则是希迪智驾来铺设MEC,希迪智驾有MEC一系列产品;
局部动态地图LDM在学术界谈的很多,通过路侧感知进行LDM地图构建,然后通过V2X将LDM地图发给车辆,理论上也可以实现某些L1/L2功能,甚至进一步更高级的自动驾驶,这样通过减少车载传感器降低成本,在封闭道路或园区内尤其适合采用这个模式。
V2X和单车智能的发展路线是独立的,单车智能在特定场景下需要依赖于V2X才行实现完全自动驾驶,在V2X则不需要依赖单车智能即可以指导车实现特定道路情况下的自动驾驶,LDM是V2X辅助实现单车自动驾驶的核心技术之一,因此LDM是目前学术界、产业界都积极在探讨和实践的一个技术方案。
【近期文章】
佐思汽研2020年多用户报告撰写计划表
《周彦武研究特辑:智能驾驶硬件指南》
「佐思研究年报及季报」
主机厂自动驾驶策略研究 | 汽车视觉产业研究 | 低速自动驾驶产业研究 | 商用车自动驾驶产业研究 | 新兴造车企业布局及智能网联功能对比分析 | 汽车MLCC研究报告 | 汽车分时租赁研究报告 | 5G自动驾驶专题研究 | 汽车仿真研究 |高精度地图产业研究 |域控制器研究 | 自动泊车与自主泊车研究 | 激光雷达研究 | 毫米波雷达研究 | 处理器和计算机芯片研究 | 红外技术及在夜视和DMS研究 | 中国毫米波雷达市场分析 | 汽车功率半导体研究 | HUD行业研究与供应商竞争力分析报告 | ADAS与自动驾驶Tier1研究 | 商用车自动驾驶研究 | 乘用车摄像头季报 | 自主车厂车联网产品分析 | T-Box市场研究报告 | 汽车网关产业研究 | 乘用车摄像头季报Q2 | 丰田汽车新四化布局 | 宝马集团新四化布局和战略研究 | 全球及中国车载语音行业 | 中国及全球汽车线束、连接器与线缆研究 | 戴姆勒新四化布局和战略研究 | 日产新四化研究 | 本田新四化研究 | 吉利新四化研究 | 大众集团新四化布局和战略研究
「佐思研究月报」
车联网月报 | ADAS/智能汽车月报 | 汽车座舱电子月报 | 汽车视觉和汽车雷达月报 | 电池、电机、电控月报
联系人: 廖棪 13718845418(同微信) 卞亚娟 18600021096(同微信)