引言
本周,“萝卜快跑”火出圈了。一个新兴技术产业,如果能在C端消费者处被广泛关注和讨论,往往能很快获得新技术最缺的初期市场需求,从而迅速加快其产业化进程。因此,我们需要重视萝卜快跑带来的自动驾驶行业的机遇。本文将以“萝卜快跑”为主题,探讨自动驾驶领域的行业性机会。
Robotaxi的前世今生
Robotaxi的设想由来已久,“萝卜快跑”的研发方百度,早在2010年就发布了第一款自动驾驶的汽车概念车。但真正将这一概念发扬光大的还是马斯克。在特斯拉推出不久后,马斯克就多次在公共场合表示过他的设想:你的特斯拉不仅仅是一辆汽车,更是生产力工具。当自动驾驶技术成熟后,特斯拉将可以在闲置时间自动上街揽客,为车主创造收入;买了有高级自动驾驶功能的特斯拉,就是“车养人”;不买特斯拉,那就是人养车。当然,马斯克也一如既往的先打嘴炮,再想办法实现:截止2024年7月,特斯拉再次推迟了原定于今年8月8日的Robotaxi发布活动,而现在距离第一批被忽悠的特斯拉车主拿到车已经过去了接近8年。这是最终极的“Robotaxi”设想,不但需要完全自动驾驶的汽车,而且还需要统一平台来进行闲置车辆的运营和共享。退而求其次,目前更现实的Robotaxi是专业的运营车辆,本质是自动驾驶的出租车。
因为Robotaxi的上路运营具有一定的风险性,所以无论在中美或是其他国家,其上路运营往往都需要一些“实验区”进行路试,积累数据并进行试运营。全球最大的“实验区”是美国的加州,大部分自动驾驶汽车的参与者都会选择在那里进行路试。全球来看,Robotaxi最主要的玩家有waymo(谷歌旗下),cruise(通用汽车旗下),zoox(亚马逊旗下),苹果,以及特斯拉的Robotaxi。国内也有许多公司在尝试Robotaxi(或高等级的自动驾驶),主要参与方有华为、百度、滴滴、小鹏、小马智行、文远知行等。

未定的技术路线之争
自动驾驶汽车的核心,自然是自动驾驶算法。萝卜快跑能跑多快,算法是个很关键的事。总体来看,自动驾驶技术的迭代大致分为以下三个阶段。
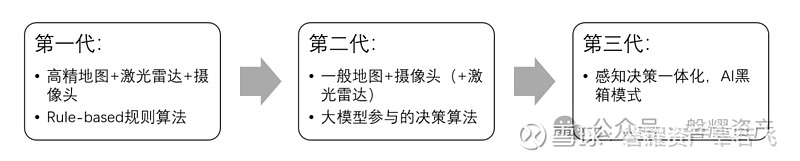
自动驾驶系统分为感知系统和决策系统。感知系统就像人的感官,确定车辆周围的情况、感知车辆身在何处;而决策系统像人的大脑,根据搜集到的感官信息来进行决策,做规划并执行。技术路线的争端,在感知系统和决策系统中都存在。
最开始,感知系统通常采用摄像头+激光雷达+高精度地图的模式;而在2020年后,特斯拉率先做出技术变革,采用只装摄像头的纯视觉方案。之所以会做出这种变革,最直接的原因是激光雷达和高精度地图太贵了:一个激光雷达成本高达8-10万,全国主要城市的高精度地图的年维护费用动辄上亿,如果自动驾驶需要客户花这么多钱,那么商业化的难度将大大提高,没多少人买得起或者愿意买。更深层次的原因则是,特斯拉(马斯克)认为人开车只需要眼睛看就行,自动驾驶系统既然是代替人的,也应该只用视觉数据,这样才能最完美的学习人、替代人。相应的,只采用视觉来感知对于算法处理提出了更高的要求。
目前在全世界范围内,采用纯视觉方案的车企可以说只有特斯拉一家,中国绝大多数的新势力(包括华为)目前都采用的激光雷达+摄像头的方案,而且这其中很大一部分也仍然依赖于高精度地图,但各家车企对于未来哪种技术更合适看法不一。支持纯视觉方案的人,看重该方案的简洁性、低成本、可迅速在不同地区间扩展复用;支持摄像头+激光雷达+高精度地图的人,看重该方案的可靠性以及中短期内的可实现性。这两者目前的使用效果没有拉开差距,因此技术路线之争也还在继续。决定用纯视觉方案还是其他方案,是车企在进军自动驾驶之前的必答题。
与感知系统类似,决策系统的路线争议也客观存在。传统的决策系统使用的是规则算法,也就是“如果看到前面的车刹车,那么我就刹车”这种“如果A,那么B”的算法。这种算法的优点是绝对不会出错,但缺点是如果出现预想之外的特殊情况,就没有对应的应对措施,自动驾驶就失效了,很可能闯祸。另一种技术路线源于2022年ChatGPT的横空出世,基于行车数据训练一个大模型来模仿人类的行为成为了可能。这种路线的显著优点是,只要训练采用的数据足够多,就不存在“特殊情况”,AI是真的学会了开车,而不是只能照着人写的规则照本宣科;但相应的,大模型算法本质是一个黑箱,其工作的基本原理是“概率”,所以永远存在误判出错的可能性。因此,也还有第三派,认为大模型+规则算法是最好的路线。
从产业角度看,目前相对公认的技术路线是纯视觉+大模型结合的决策算法,这个路线获得了特斯拉+华为的双重背书。再回头看,萝卜用的是什么路线呢?从公开信息看,感知系统采用的是高精地图+激光雷达+摄像头的最传统路线,决策系统目前也还是使用的规则算法为主的路线。显然,这并不是最先进的路线,也不是认可度最高的路线。当然,先进的不一定是最合适的,萝卜目前营运车辆不过上千辆,自动驾驶汽车也只是在起步阶段,目前能用好用就是最重要的。但如果期待萝卜进一步的发展,技术路线的选择是否会被证伪,这是个大问题。
尚不完美的商业模式
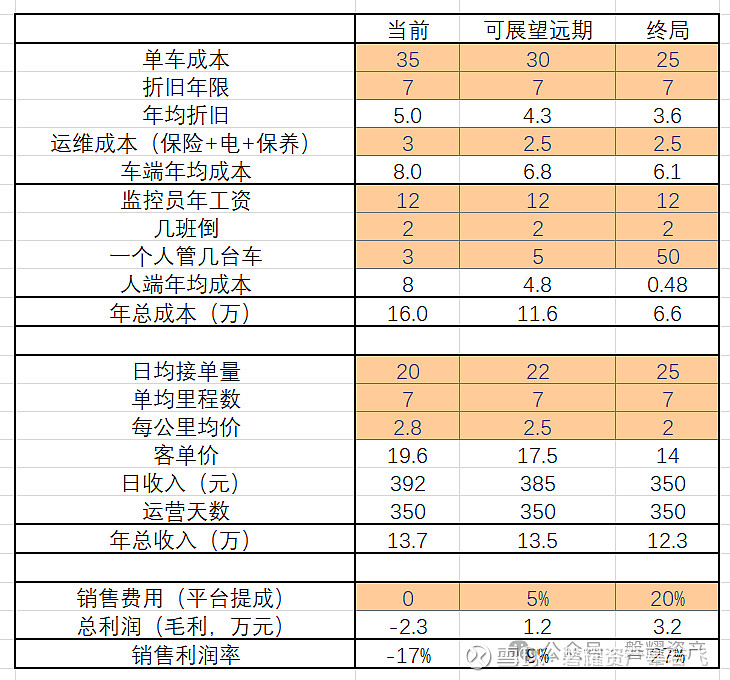
如果技术路线不是最优的,但现在也能赚钱,那也算是好生意。但从笔者目前搜集到的信息来看,萝卜快跑并没能完成商业闭环或者盈利。自动驾驶出租车的主要成本,包括车辆折旧、运维费用、监督员人工成本。在收入侧,目前萝卜快跑有大量地方政府的补贴,所以消费者终端支付的价格非常低。即使将补贴包括在收入中,我们也能看到,目前的情况也不能完成经营层面的盈利——这还没有考虑诸如研发费用、管理费用等等费用项。
当然,现在不跑通不代表跑不通。根据我们的假设,只要单车成本下降、监控员数量减少,很快就可以扭亏为盈,形成商业模式闭环。
总结:萝卜终究会跑起来,而且应该不远了
综上所述,萝卜快跑因为偶然的机会爆火出圈,在资本市场和舆论圈都引发了大风浪。从投资的角度看,萝卜采用的自动驾驶技术并不领先,商业闭环也尚未完成,处于非常早期的阶段。但是,商业闭环所需的“单车成本下降”只需要车型量产放量就能达到,减少监控员可以通过车型放量之后大规模、长时间的实践运营来解决,技术路线争端则是“东方不亮西方亮”,萝卜如果走错了,那华为、特斯拉也能站在他的肩膀上继续前进。而由于有了社会关注度,需求自然会增加,如果地方政府监管也配合,车型放量量产的进度很可能会加速。因此,车型放量——监控员减少,商业模式跑通——大量实操数据,证明技术路线优劣——技术路线之争解决,自动驾驶汽车很可能再未来的1-2年内就出现大爆发,我们会对该方向保持研究跟踪,适时参与和配置。
(完)
近期原创链接:
【磐耀周评】再论面板行业投资机会
【磐耀周评】关注NASH行业需求0到1的爆发式增长机会什么是NASH
【磐耀周评】KIMI助力国产AGI进入加速期
【磐耀周评】关注医药大单品:低浓度阿托品带来的投资机会
【磐耀周评】利好不断,市场开门红行情可期
【磐耀周评】探寻“银发经济”的逻辑和机遇
【磐耀周评】磐耀周评:关注人口老龄化疾病阿尔兹海默症的潜在投资机会
【磐耀周评】低空经济:eVTOL带来的交通革命
【磐耀周评】供给格局优化,面板行业有望迎来新一轮上涨周期
【磐耀周评】浅谈创新药研发的基本流程
【磐耀周评】生猪产能去化有望加速
【磐耀周评】AI大语言模型公司简析:竞争格局、盈利模式与估值
【磐耀周评】医疗反腐不必恐慌,底部孕育大机会
【磐耀周评】A股历史上的政策底与市场底,以及当下的市场展望
【磐耀周评】政策底向市场底过渡 积极储备未来成长方向
【磐耀周评】存量之下,人工智能增量方向变得更加珍贵
【磐耀周评】关注存储器板块投资机会
【磐耀周评】关注特纸板块盈利修复
【磐耀周评】医药底部寻金系列——一次性手套
【磐耀周评】分歧之下人工智能行情将何去何从
【磐耀周评】市场即将迎来新一轮布局机会
【磐耀周评】关注IOT方向的布局机会
备注:
如果您觉得本公众号内容对您有所启发
欢迎转发或转载
您的支持是我们工作最大的动力!
上海磐耀资产管理有限公司成立于2014年12月4日,于2015年3月成为中国基金业协会认定的私募投资基金管理人。公司总部位于中国上海,发行基金产品数量超过百只,是一家以股票多头为主的私募基金公司。凭借优秀的长期业绩表现,公司曾连续荣获中国证券报金牛奖、证券时报金长江奖、上海证券报金阳光奖、基金报英华奖以及多家机构的评选奖项。