人形机器人主要环节分析
人形机器人目前成本在50万左右,未来要降低到15-20万的话,必须要发挥中国制造业低成本高效率的优势。若成本降下来,会迎来大量的替换需求。(低于人工成本且易于管理)
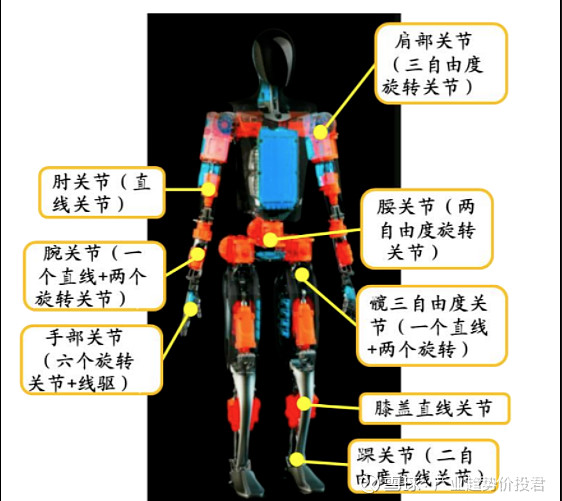
特斯拉的人形机器人主要由28个关节组成,包括14个直线关节和14个旋转关节。直线关节主要需要使用线性执行器,旋转关节需使用旋转执行器。
人形机器人还有两只手,手指头需要使用单独的手指执行器进行控制。
1.线性执行器主要用在腿部,手臂,负责让机器人行走和抬手。线性执行器的动力源是无框力矩电机,通过滚柱丝杠将电机发出的动力转换成直线运动。
目前线性执行器领域值得投资的方向有三个
(1)线性执行器整机,目前基本由拓普集团负责。
(2)滚柱丝杠,这个领域目前主要由德国的舍弗勒供应,舍弗勒是全球滚柱丝杠的绝对龙头,国内正在开发滚柱丝杠的企业主要包括恒立液压,贝斯特和五洲新春。(目前替代难度最大的环节,欧洲企业有很长的历史, 行星滚柱丝杆难度很大,国内厂商差距较大 )
(3)无框力矩电机,这一块国内目前还没有上市公司取得突破。
2.旋转执行器主要应用在机器人的肩关节、腕关节、髋关节、腰部,主要是帮助机器人进行转动。
旋转执行器使用的零部件是无框力矩电机和减速器,无框力矩电机提供动力,减速器相当于人体内的肌腱,帮助关节实现转动。
按照体积和负重能力划分,又可以把减速器分成RV减速器,谐波减速器和行星减速器。
RV减速器体积最大,主要用在机器人的腰部;谐波减速器体积适中,一般用在肩和腕部;行星减速器体积最小,一般用在手指。
旋转执行器的投资方向也是三个:
(1)旋转执行器的整机,这块目前主要由三花智控负责。
(2)谐波减速器,这块目前全球的龙头厂商是日本的哈默纳科,国内的龙头厂商主要是绿的谐波。
(3)RV减速器,这块国内的龙头是双环传动,不过双环传动准备把旗下负责减速器的子公司传动科技分拆上市。
3,手指执行器主要用来组成灵巧手,主要功能是实现对物体的抓取和放下。
灵巧手需要使用体积更小的空心杯电子和行星减速器。目前国内空心杯电机领域的龙头是鸣志电器,行星减速器领域的龙头是中大力德。
4.传感器和编码器
按照感应能力划分,传感器可以分成一维传感器到六维传感器。
一维传感器能够感应的面积比较有限,六维传感器是最高端的传感器,可以感受多个方向的信息,这个产品价值量也很高,单价要3-5万,但是还没有国内厂商能够提供。
编码器主要测量机器人的位移和速度,确保机器人能够准确到达相应的位置,这个领域国内目前也没有公司能够提供。
价值量、市场空间测算
按照价值量来划分,一个机器人需要14个线性执行器(单价3500,总价4.9万),14个旋转执行器(单价4000,总价5.6万),14个滚柱丝杠(单价1000,总价1.4万),2个RV减速器(单价4000,总价0.8万),14个谐波减速器(单价1000,总价1.4万),12个空心杯电机(单价500,总价0.6万),12个行星减速器(单价300,0.36万)。
假设人形机器人实现年产100万的目标,相关产业的增量空间为线性执行器490亿,旋转执行器560亿,滚柱丝杠140亿,RV减速器80亿,谐波减速器140亿,空心杯电机60亿,行星减速器36亿。如果1000万台则翻十倍,市场空间相当可观。
人形机器人领域业绩确定性比较高的是拓普集团和三花智控(具有特斯拉产业链优势,目前已经在联合开发),弹性比较大的主要是绿的谐波,鸣志电器和贝斯特。替代难度较大,有一定阿尔法的环节为滚珠丝杆环节,鼎智科技,五洲新春和贝斯特。