5月27日消息,近日瑞士生物计算初创公司FinalSpark推出了全球第一个基于体外生物神经元的在线生物计算平台“Neuroplatform”,能够进行学习和处理信息,相比传统数字处理器的功耗低了100万倍。
能耗更低的生物计算技术
FinalSpark公司表示,当今社会,处理数字信息所需要的巨大能源成本,已经成为了现代科学技术进步的重要代价之一。特别是随着生成式人工智能(AI)的爆发,所训练的AI大模型参数也变得越来越大,使用大模型的用户越来越多,需要的基于硅基的AI芯片也越来多,消耗的能源也越来越庞大。
例如,训练像 GPT-3这样的单个大语言模型大约需要 10 GWh的能耗,这大约是欧洲公民每年使用能源的 6,000 倍。除了与训练LLM相关的大量能源需求外,推理成本也是一个同样紧迫的问题。据 OpenAI 首席执行官 Sam Altman 最近披露的数据显示,OpenAI 等平台每天通过 ChatGPT 等服务生成超过 1000 亿个单词,这所带来的能耗也将是相当惊人的。使用 LLaMA 65B 模型作为参考点的初步计算表明,仅单词生成的能量消耗就从每天 450 到 6000 亿焦耳不等。虽然为全球数百万用户提供人工智能驱动的见解和交互是必要的,但这种能源使用量凸显了更节能计算范式的紧迫性。
根据市场调研机构Factorial Funds的报告显示,OpenAI的文字生成视频模型Sora一个月内使用4,200至10,500片H100 GPU,其中单个H100能在约12分钟内生成一个一分钟视频,或者每小时约5个一分钟视频。而在Sora高峰时期需要72万个H100 GPU。按照H100 GPU的峰值功耗为700瓦,如果再算上GPU本身及服务器、数据中心所需要配套的其他部件及散热所需的功耗,拥有72万个H100 GPU的一个AI数据中心每小时的能耗将会超过7.2亿瓦时。
高盛发布的一项最新研究报告也表示,随着人工智能的快速发展,对于算力的需求也是越来越高。预计到2030年,全球AI数据中心对于电力的需求将增长160%。
FinalSpark指出,人工智能的发展不能仅仅因为“它消耗太多能源”而通过实施监管来限制现有人工智能模型的开发和使用,因为失去技术发展的领先地位可能会带来巨大的战略成本。因此,应该在增加绿色能源供给的同时,采用更为节能的非常规计算技术,来作为减少二氧化碳排放的最佳途径。
资料显示,生物计算就是一种更为节能的非常规计算技术,这一个由活神经元构建计算机的领域,其最大优势之一是神经元计算信息所需的能量比数字计算机要少得多。据估计,活体神经元消耗的能量比我们目前使用的数字处理器要低 100 万倍以上。比如人脑大约有860亿个神经元,而功耗仅为20瓦左右。
FinalSpark表示,鉴于现有的基于硅基芯片来运行的人工神经网络 (ANN)所面临的巨大功耗问题,正在兴起的基于人工生物神经网络(BNN)的生物计算机具有很诱人的前景。
FinalSpark的生物计算平台“Neuroplatform”
根据研究显示,活体大脑中的神经是具有高度可塑性的,这种可塑性是可以由许多因素触发,实际上是由到达我们大脑的任何感官刺激触发的。当我们做一些新的事情时尤其如此,例如学习、阅读、解决问题、学习新动作或任何新体验——无论是在外部世界还是在内部世界(通过情绪,我们通过情绪来感知我们的内部信号)。
FinalSpark就是试图通过电刺激触发的活体神经元的可塑性,利用活体神经元的自然能力来量化、存储和处理信息。FinalSpark的目标是以可预测的、可控的方式修改活体神经元,从而允许执行计算。
“我们相信,这是生物计算新兴领域的未来,其中生物元素被用作硬件。毕竟,还有什么生物物质能比活的神经元更适合计算呢?”FinalSpark在其官方博客文章中写道。
为了研究生物计算技术,FinalSpark实验室使用了成体体细胞(如皮肤细胞)重编程为诱导多能干细胞(iPSC)的人类神经元构建了一个神经球,这是一个由约 10000个活神经元构成的活体“类脑器官”(FO),直径约为 0.5 毫米。通常,这类神经球被用于生物医学研究、研究脑部疾病以及更好地了解人类大脑的工作原理。但是,FinalSpark首次将它们用于生物计算,旨在构建一种新型计算机处理器。
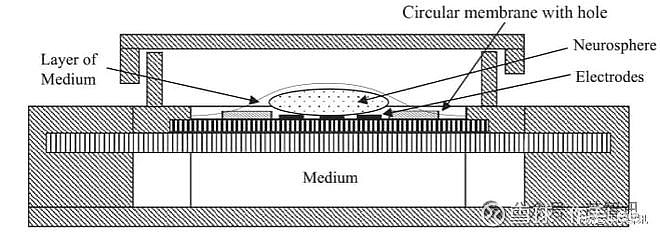
此次,FinalSpark所推出的在线生物计算平台“Neuroplatform”就是由16个上述“类脑器官”组成,其中每4个“类脑器官”使用多电极阵列(MEA)来连接,即构成脑组织的3D细胞团。换句话来说就是,每个MEA可容纳四个“类脑器官”,总共使用8个电极连接(如下图),使用数模转换器 (DAC) 发送电信号,并通过模数转换器 (ADC) 从神经元收集信号。
据介绍,MEA 装置采用空气-液体界面 (ALI) 方法,其中将类脑器官直接放置在位于通透膜上方的电极上,培养基在 170 μL 腔室中在该膜下方流动。由表面张力形成的一层薄薄的培养基将类器官的上侧与加湿的培养箱空气隔开。部分覆盖 MEA 的盖子进一步保护了这种布置(如下图)。与浸没式培养的方法相比,这种 ALI 方法可实现更高的通量和更高的稳定性,因为不需要专门的涂层,并且类脑器官也不太容易从电极上脱落。
该生物计算系统中的电极是既可以进行刺激(输入),也可以进行记录(输出)的。相应的数模转换和模数转换由 Intan RHS 32 探头执行。使用范围从 10 nA 到 2.5 mA 的电流控制器执行刺激,并通过测量每个电极上的电压来获得记录,采样频率为 30 kHz,分辨率为 16 bit,精度为 0.15 μV。探头连接到 Intan RHS 控制器,控制器又通过 USB 端口连接到计算机。
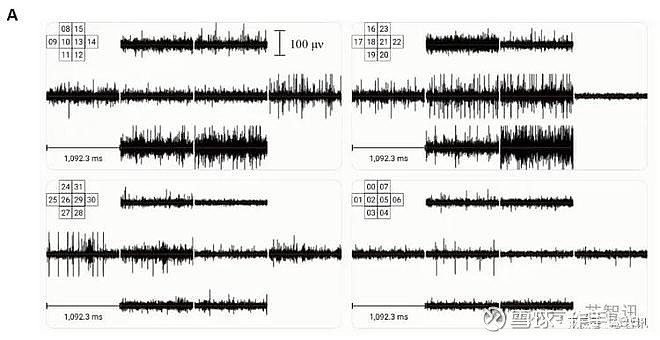
△以 μV 为单位测量 32 个电极中每个电极一秒钟的电活动,每组 8 个电极记录不同的类脑组装
上图显示了 32 个电极中的每一个所记录的电活动。可以注意到,每个电极记录的活动是不同的。因为,每组 8 个电极记录不同的类脑器官,并且对于给定的类脑器官,每个电极记录也是在不同的位置。该显示的数据已经实时刷新呈现在了网上,研究者可以通过FinalSpark的网站( 网页链接),全天候查看。
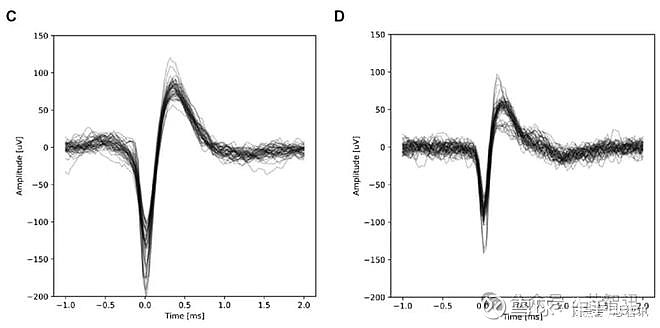
FinalSpark表示,“我们比较了此 ALI 装置的记录特性与监测浸没式类脑器官的 MCS MEA (60MEA200/30iR-Ti),使用完全相同的 Intan 系统进行电压转换。下图显示了分别使用 ALI 和浸没式装置记录的动作电位叠加图,并显示了相似的信号特性。
Neuroplatform系统依赖于一个笔记本电脑来进行操控,提供对 3 种资源的访问:
1. 一个数据库,其中存储了有关Neuroplatform系统的所有信息;
2. 在专用 PC 上运行的 Intan 软件,用于记录 200 毫秒时间窗口内检测到的尖峰数量和设置刺激参数;
3. 根据刺激参数触发电流刺激的树莓派开发板。
类脑器官寿命已超100天
为了维持类脑器官的生命,需要保持在无菌的37℃左右环境的环境中,并不断供应神经元培养基 (NM)。对此,FinalSpark设计了闭环微流体系统,可实现全天候培养基供应,从而减少培养箱中物理干预的干扰,并确保稳定的环境条件。
据介绍,该培养基以 15uL/min 的速率循环,培养基流速由 BT-100 2 J 蠕动泵控制,并根据需要(例如在实验运行期间)不断调整。蠕动泵使用 RS485 接口连接到 PC 控制软件,用于编程(即 Python)或手动操作。
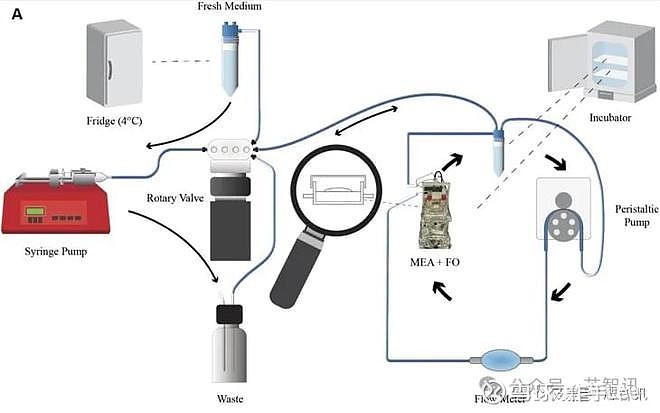
该微流体回路系统由 0.8 毫米(内径,ID)管道制成。使用 Fluigent 流量传感器对微流体回路和流速进行持续监测,该传感器通过 USB 连接到 Neuroplatform 控制中心。与介质流速相关的数据存储在数据库中以供以后访问。
此外,每个MEA 都配备了一个 1230 万像素的摄像头,可以通过交互方式或编程方式(例如通过 Raspberry Pi)控制,捕捉静态图像或录制视频,以识别例如细胞坏死、微流体可能导致的类器官位移、培养基酸度变化(使用颜色分析,因为我们的培养基含有酚红)、污染、神经黑色素生成(可能在释放多巴胺时发生)、溢出(培养基无意中填充了膜上方的腔室)或培养基中的气泡等问题。
在类脑器官寿命方面,FinalSpark表示,最初它们的寿命只有几个小时,但经过各种改进,特别是与微流体系统相关的改进,在最好的情况下已将其寿命延长至超过100天。
已有32个研究小组申请合作
为了便于共同研究基于人工生物神经网络(BNN)的生物计算,并为使用生物神经元的神经网络开发全新的方法,需要一个能够进行大量实验的系统,因此FinalSpark开发了Neuroplatform系统,并支持7×24小时的全天候电刺激、动作电位监测,允许全世界的研究人员以无与伦比的规模进行电生理实验。
FinalSpark表示:“使用活神经元构建下一代生物处理器并非易事。尽管具有很多优势,例如能源效率、可扩展性和经过验证的信息处理能力,但来自活神经元的生物处理器很难开发。我们仍然不知道如何对它们进行编程。与数字计算机不同,生物计算机是真正的黑匣子。出于这个原因,我们需要大量的实验来使它们发挥作用。但是,如果我们找到一种方法来控制这些黑匣子,它们就可以成为真正强大的IT工具。”
据介绍,在过去三年中,Neuroplatform系统累计通过 1,000 多个类脑器官,收集了超过 18 TB 的数据。目前在 2024 年,该系统已经对外开放用于研究目的。尽管已有 32 个研究小组要求访问 Neuroplatform,但考虑到自身的研究需求,目前的基础设施只能容纳 7 个研究小组。因此,FinalSpark正在扩大AC/DC硬件系统的规模,以同时支持更多用户。
FinalSpark 的联合创始人 Fred Jordan 说:“我们坚信,只有通过国际合作才能实现这样一个雄心勃勃的目标。”
需要指出的是,FinalSpark目前仅限于在一个类脑器官上执行神经可塑性的闭环算法,因为这些算法需要向每个类脑器官发送实时适应的模拟信号。为此,FinalSpark的软件也正在更新,未来将可支持在多达 32 个类脑器官上并行闭环运行。