
深海仍然是地球上最大的未知领域。深海的压力极高,人造机器通常都需要刚性容器和压力补偿系统来保护机电系统,探索难度巨大。然而,不具备庞大或沉重的耐压系统的深海生物却可以在极深的海底安然无恙地生存。
狮子鱼就是生存在已知的海洋最深处——马里亚纳海沟中的生物之一。受狮子鱼结构的启发,浙江大学航空航天学院交叉力学中心李铁风教授团队联合之江实验室,开发了一种用于深海勘探的无线自供能仿生软体机器人。他们在10900米深的马里亚纳海沟和3224米深的中国南海对该机器人进行了实际测试,验证了其耐压性能和游泳性能。
软体机器人在10900米深的马里亚纳海沟中拍打双鳍(来源:Nature)
这项研究成果于3月4日,作为封面文章“Self-powered soft robot in the Mariana Trench”刊发在国际顶级期刊《Nature》上。

Self-powered soft robot in the Mariana Trench. Nature 591, 66–71 (2021).

来自深海鱼的灵感
这款仿生软体机器人实际上更适合被称为“机器鱼”。它长22cm,翼展宽度28cm,大约为一张A4纸的长宽,由软体人工肌肉驱动一对翅膀状的柔性胸鳍,通过节律性扑翅实现游动。
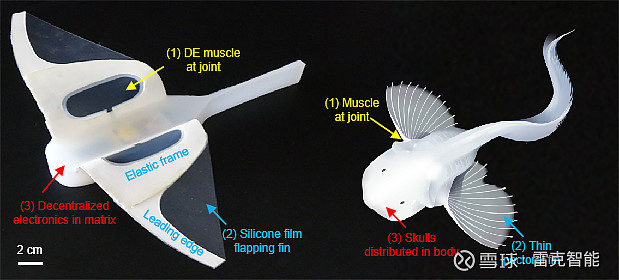
仿生狮子鱼深海软体机器人(来源:Nature)
据该浙江大学李铁风教授介绍,在10900米的海底,静水压高约110兆帕,接近于1100个大气压。“用一个不太恰当的比方,相当于一吨重的小汽车全压在指尖上。过去,需要高强度的金属外壳(如钛合金)或压力补偿系统来保护,才能克服深海极高的静水压力。”
然而,他们并没有选择“硬抗”这种压力,而是从深海生物中获取仿生启发。
在马里亚纳海沟6000米到11000米之间的深度区域,仍有数百种物种生存,狮子鱼就是其中的一种。通过对深海狮子鱼的结构分析,他们发现,深海狮子鱼的骨骼细碎状地分布在凝胶状柔软的身体中,有助于其在高压力环境下的生存与活动。
因此,他们通过在硅树脂基质中集成电子设备,并设计调节电子器件与软体的材料和结构,优化机器人在高压环境下体内的应力状态,保护机载电源、控制和驱动装置免受深海静水压力困扰。为了减少电子元件之间界面处的剪应力,他们还通过增加元件之间的距离或将其与印刷电路板分开来分散电子元件。
自带能源实现鱼鳍扑动
这项研究还首次在万米深海实现了自带能源软体人工肌肉驱控和软体机器人深海自主游动。这主要依靠的是介电弹性体(dielectric elastomer)材料。
介电弹性体是一种加上电压即可出现形变的电激活聚合物,能将电能转化为机械功。当机器人电池的电流作用于肌肉时,肌肉就会收缩,微小的固体结构通过机械方式将收缩肌与鳍相连,使其拍打运动。
这款机器人利用围绕在人工肌肉外的海水作为离子导电负极,由自带能源在人工肌肉内外侧厚度方向产生电势差,使高分子薄膜发生舒张与收缩形变,鱼鳍从而能够上下拍动,推动水中前行。

软体机器人在3224米深的南海中游动(来源:Nature)
当然,要在深海中驱动,机器人还需克服高分子材料在高压和低温时电驱动能力衰减的问题。为此,该团队与浙江大学化学工程与生物工程学院罗英武教授课题组合作研制了能适应深海低温、高压等极端环境的电驱动人工肌肉,在高压低温环境下依然能保持良好电驱动性能,即便是在马里亚纳海沟的低温(0~4℃)、高压环境(110 MPa)下依旧能正常工作。
李铁风介绍,这项研究为深海探测作业、环境的观察和深海生物的科考提供了新的解决方案,有望大幅提升深海智能装备和机器人的应用能力,让柔性智能设备从常规环境走向深海作业等多样任务与复杂场景,又迈出了坚实的一步。
参考文献
[1] Li, G., Chen, X., Zhou, F. et al. Self-powered soft robot in the Mariana Trench[J]. Nature,2021,591:66-71. 网页链接
[2] 吴雅兰,柯溢能,卢绍庆.成功“打卡”马里亚纳海沟,浙大仿生软体智能机器鱼研究登《自然》封面[EB/OL].(2021-03-04)[2021-03-09].网页链接
关注“雷克智能”公众号后不要忘记星标
我们还在搜狐新闻、腾讯新闻、网易新闻、今日头条、天天快报、一点资讯、雪球财经、凤凰新闻……