由于矿区环境相对封闭,行驶路线固定且行驶速度慢,但工况复杂、环境恶劣,因此,矿区运输矿卡无人化在矿山场景得到快速推广、规模化落地应用。
据了解,2020-2025年是我国矿区自动驾驶的重点建设期,市场体量高达千亿级。
激光雷达作为无人矿卡的“眼睛”,具有高精度、远距离、高稳定性的优点,为无人矿卡在恶劣工况下提供高稳定感知,精准探测,保障复杂工况车辆行驶安全。

矿区环境
然而,在矿区环境作业时,灰尘、粉尘四起,不仅逐渐布满激光雷达表面,还会在前方形成一片尘雾,仿佛一道帘子遮住了无人矿卡的“眼睛”,影响激光雷达的探测质量,甚至导致无人驾驶车辆误判。因此在无人矿卡车辆工况实际环境运营中,灰尘对雷达感知硬性影响是行业面临的难题。

矿卡行进时的灰尘

矿卡行进时的灰尘
镭神智能工程师长期深入无人矿卡运营现场,经过多年探索,将扬尘特性与点云算法进行了大量的对比实验计算,形成了一套适用于矿卡运营工况的激光雷达灰尘过滤的算法。此套算法可结合镭神智能任意一款激光雷达搭载在无人车辆上,解决如矿区等多粉尘环境下无人驾驶的感知精度问题,提升无人驾驶运行效率和安全性,首次攻破国产激光雷达矿区无人驾驶应用难题。
// 灰尘算法优化前
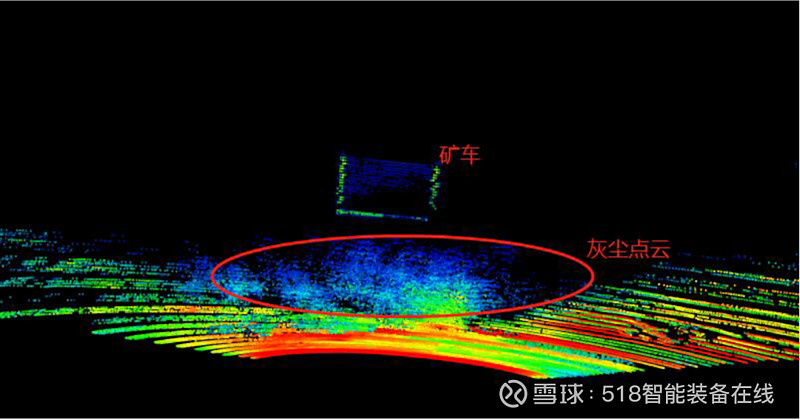
检测到灰尘
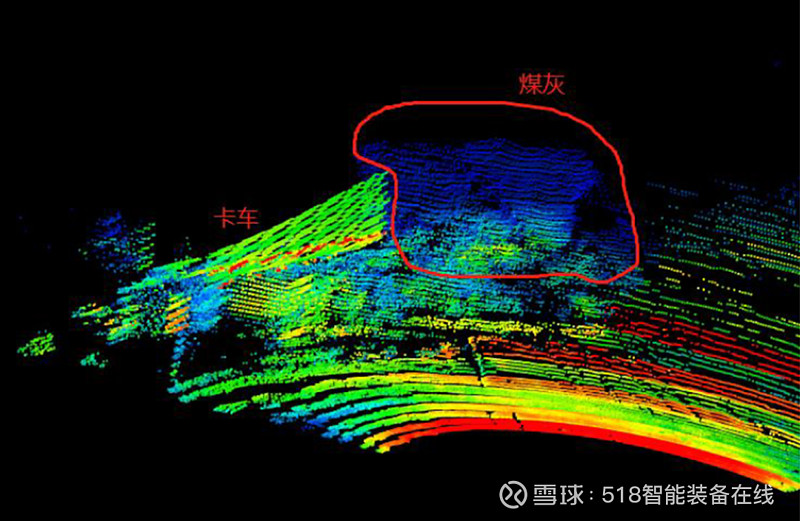
检测到煤灰
// 灰尘算法优化后
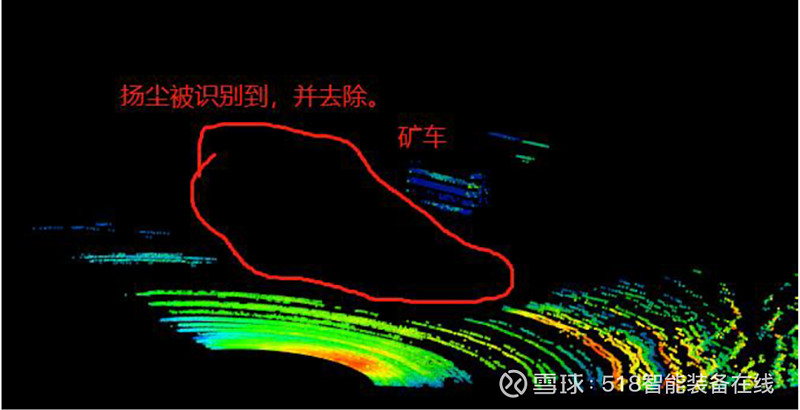
灰尘被优化去除
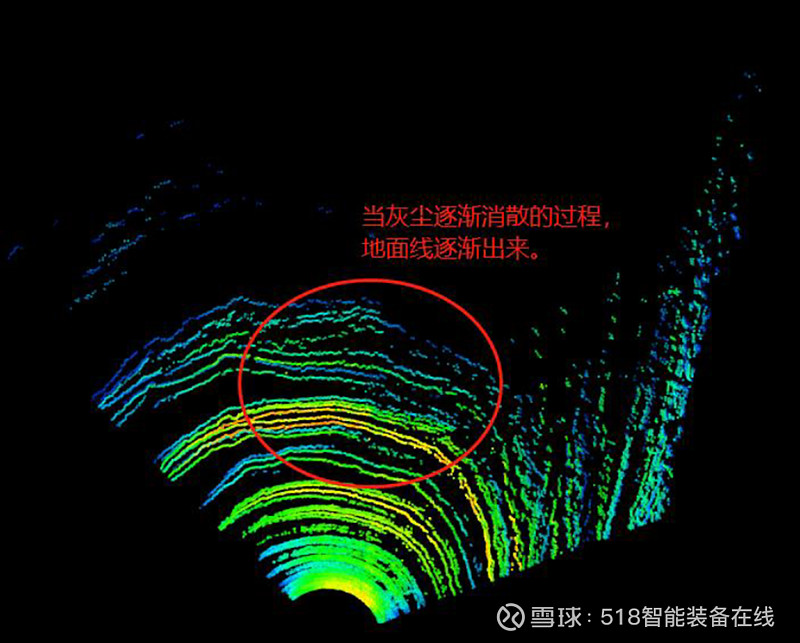
灰尘消散后,地面检出
可以从点云图中看出,镭神智能激光雷达可以识别并去除大片的灰尘,减轻上位机滤除的负担;当中远处物体没有被煤灰遮挡时,仍然可以检测到中远处物体。
目前,搭载镭神智能混合固态激光雷达系列产品的无人矿卡在多个大型矿区稳定运行,为矿区运营安全降本增效。

镭神智能始终坚持深入挖掘各行业痛点,研发推出基于激光雷达的全场景行业应用解决方案,为各行业客户提供安全、高效、高价值的感知精品。